大网站前端怎么做的太原搜索排名提升
SPI设备树处理过程
文章目录
- SPI设备树处理过程
- 参考资料:
- 一、 spi_device结构体
- 二、 SPI设备树格式
- 2.1 SPI Master
- 2.2 SPI Device
- 2.3 设备树示例
- 三、设备树实例
- 3.1 使用GPIO模拟的SPI控制器
- 3.2 IMX6ULL SPI控制器
- 四、 设备树处理过程
- 致谢
参考资料:
- 内核头文件:
include\linux\spi\spi.h - 内核文档:
Documentation\devicetree\bindings\spi\spi-bus.txt - 内核源码:
drivers\spi\spi.c
一、 spi_device结构体
/*** struct spi_device - Master side proxy for an SPI slave device* @dev: Driver model representation of the device.* @master: SPI controller used with the device.* @max_speed_hz: Maximum clock rate to be used with this chip* (on this board); may be changed by the device's driver.* The spi_transfer.speed_hz can override this for each transfer.* @chip_select: Chipselect, distinguishing chips handled by @master.* @mode: The spi mode defines how data is clocked out and in.* This may be changed by the device's driver.* The "active low" default for chipselect mode can be overridden* (by specifying SPI_CS_HIGH) as can the "MSB first" default for* each word in a transfer (by specifying SPI_LSB_FIRST).* @bits_per_word: Data transfers involve one or more words; word sizes* like eight or 12 bits are common. In-memory wordsizes are* powers of two bytes (e.g. 20 bit samples use 32 bits).* This may be changed by the device's driver, or left at the* default (0) indicating protocol words are eight bit bytes.* The spi_transfer.bits_per_word can override this for each transfer.* @irq: Negative, or the number passed to request_irq() to receive* interrupts from this device.* @controller_state: Controller's runtime state* @controller_data: Board-specific definitions for controller, such as* FIFO initialization parameters; from board_info.controller_data* @modalias: Name of the driver to use with this device, or an alias* for that name. This appears in the sysfs "modalias" attribute* for driver coldplugging, and in uevents used for hotplugging* @cs_gpio: gpio number of the chipselect line (optional, -ENOENT when* when not using a GPIO line)** @statistics: statistics for the spi_device** A @spi_device is used to interchange data between an SPI slave* (usually a discrete chip) and CPU memory.** In @dev, the platform_data is used to hold information about this* device that's meaningful to the device's protocol driver, but not* to its controller. One example might be an identifier for a chip* variant with slightly different functionality; another might be* information about how this particular board wires the chip's pins.*/
struct spi_device {struct device dev;struct spi_master *master;u32 max_speed_hz;u8 chip_select;u8 bits_per_word;u16 mode;
#define SPI_CPHA 0x01 /* clock phase */
#define SPI_CPOL 0x02 /* clock polarity */
#define SPI_MODE_0 (0|0) /* (original MicroWire) */
#define SPI_MODE_1 (0|SPI_CPHA)
#define SPI_MODE_2 (SPI_CPOL|0)
#define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
#define SPI_CS_HIGH 0x04 /* chipselect active high? */
#define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
#define SPI_3WIRE 0x10 /* SI/SO signals shared */
#define SPI_LOOP 0x20 /* loopback mode */
#define SPI_NO_CS 0x40 /* 1 dev/bus, no chipselect */
#define SPI_READY 0x80 /* slave pulls low to pause */
#define SPI_TX_DUAL 0x100 /* transmit with 2 wires */
#define SPI_TX_QUAD 0x200 /* transmit with 4 wires */
#define SPI_RX_DUAL 0x400 /* receive with 2 wires */
#define SPI_RX_QUAD 0x800 /* receive with 4 wires */int irq;void *controller_state;void *controller_data;char modalias[SPI_NAME_SIZE];int cs_gpio; /* chip select gpio *//* the statistics */struct spi_statistics statistics;/** likely need more hooks for more protocol options affecting how* the controller talks to each chip, like:* - memory packing (12 bit samples into low bits, others zeroed)* - priority* - drop chipselect after each word* - chipselect delays* - ...*/
};
各个成员含义如下:
- max_speed_hz:该设备能支持的SPI时钟最大值
- chip_select:是这个spi_master下的第几个设备
- 在spi_master中有一个cs_gpios数组,里面存放有下面各个spi设备的片选引脚
- spi_device的片选引脚就是:cs_gpios[spi_device.chip_select]
- cs_gpio:这是可选项,也可以把spi_device的片选引脚记录在这里
- bits_per_word:每个基本的SPI传输涉及多少位
- word:我们使用SPI控制器时,一般是往某个寄存器里写入数据,SPI控制器就会把这些数据一位一位地发送出去
- 一个寄存器是32位的,被称为一个word(有时候也称为double word)
- 这个寄存器里多少位会被发送出去?使用bits_per_word来表示
- 扩展:bits_per_word是可以大于32的,也就是每次SPI传输可能会发送多于32位的数据,这适用于DMA突发传输
- mode:含义广泛,看看结构体里那些宏
- SPI_CPHA:在第1个周期采样,在第2个周期采样?
- SPI_CPOL:平时时钟极性
- SPI_CPHA和SPI_CPOL组合起来就可以得到4种模式
- SPI_MODE_0:平时SCK为低(SPI_CPOL为0),在第1个周期采样(SPI_CPHA为0)
- SPI_MODE_1:平时SCK为低(SPI_CPOL为0),在第2个周期采样(SPI_CPHA为1)
- SPI_MODE_2:平时SCK为高(SPI_CPOL为1),在第1个周期采样(SPI_CPHA为0)
- SPI_MODE_3:平时SCK为高(SPI_CPOL为1),在第2个周期采样(SPI_CPHA为1)
- SPI_CS_HIGH:一般来说片选引脚时低电平有效,SPI_CS_HIGH表示高电平有效
- SPI_LSB_FIRST:
- 一般来说先传输MSB(最高位),SPI_LSB_FIRST表示先传LSB(最低位);
- 很多SPI控制器并不支持SPI_LSB_FIRST
- SPI_3WIRE:SO、SI共用一条线
- SPI_LOOP:回环模式,就是SO、SI连接在一起
- SPI_NO_CS:只有一个SPI设备,没有片选信号,也不需要片选信号
- SPI_READY:SPI从设备可以拉低信号,表示暂停、表示未就绪
- SPI_TX_DUAL:发送数据时有2条信号线
- SPI_TX_QUAD:发送数据时有4条信号线
- SPI_RX_DUAL:接收数据时有2条信号线
- SPI_RX_QUAD:接收数据时有4条信号线
二、 SPI设备树格式
对于SPI Master,就是SPI控制器,它下面可以连接多个SPI设备。
在设备树里,使用一个节点来表示SPI Master,使用子节点来表示挂在下面的SPI设备。
2.1 SPI Master
在设备树中,对于SPI Master,必须的属性如下:
- #address-cells:这个SPI Master下的SPI设备,需要多少个cell来表述它的片选引脚
- #size-cells:必须设置为0
- compatible:根据它找到SPI Master驱动
可选的属性如下:
- cs-gpios:SPI Master可以使用多个GPIO当做片选,可以在这个属性列出那些GPIO
- num-cs:片选引脚总数
其他属性都是驱动程序相关的,不同的SPI Master驱动程序要求的属性可能不一样。
2.2 SPI Device
在SPI Master对应的设备树节点下,每一个子节点都对应一个SPI设备,这个SPI设备连接在该SPI Master下面。
这些子节点中,必选的属性如下:
- compatible:根据它找到SPI Device驱动
- reg:用来表示它使用哪个片选引脚
- spi-max-frequency:必选,该SPI设备支持的最大SPI时钟
可选的属性如下:
- spi-cpol:这是一个空属性(没有值),表示CPOL为1,即平时SPI时钟为低电平
- spi-cpha:这是一个空属性(没有值),表示CPHA为1),即在时钟的第2个边沿采样数据
- spi-cs-high:这是一个空属性(没有值),表示片选引脚高电平有效
- spi-3wire:这是一个空属性(没有值),表示使用SPI 三线模式
- spi-lsb-first:这是一个空属性(没有值),表示使用SPI传输数据时先传输最低位(LSB)
- spi-tx-bus-width:表示有几条MOSI引脚;没有这个属性时默认只有1条MOSI引脚
- spi-rx-bus-width:表示有几条MISO引脚;没有这个属性时默认只有1条MISO引脚
- spi-rx-delay-us:单位是毫秒,表示每次读传输后要延时多久
- spi-tx-delay-us:单位是毫秒,表示每次写传输后要延时多久
2.3 设备树示例
spi@f00 {#address-cells = <1>;#size-cells = <0>;compatible = "fsl,mpc5200b-spi","fsl,mpc5200-spi";reg = <0xf00 0x20>;interrupts = <2 13 0 2 14 0>;interrupt-parent = <&mpc5200_pic>;ethernet-switch@0 {compatible = "micrel,ks8995m";spi-max-frequency = <1000000>;reg = <0>;};codec@1 {compatible = "ti,tlv320aic26";spi-max-frequency = <100000>;reg = <1>;};};
三、设备树实例
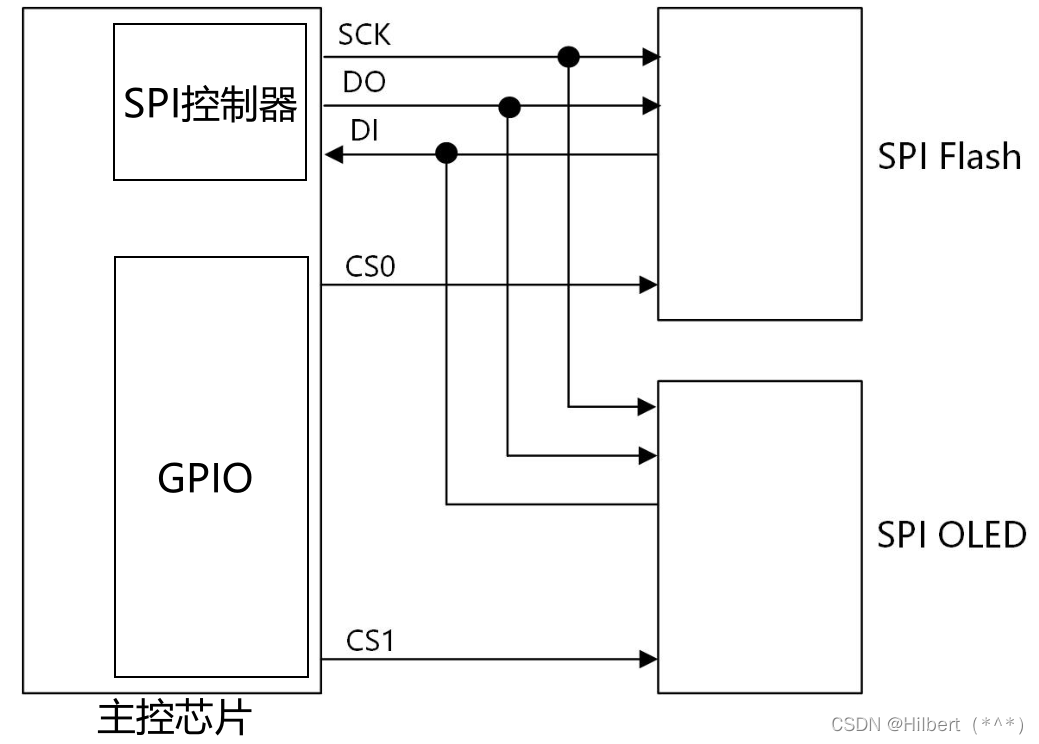
在设备树里,会有一个节点用来表示SPI控制器。
在这个SPI控制器下面,连接有哪些SPI设备?会在设备树里使用子节点来描述SPI设备。
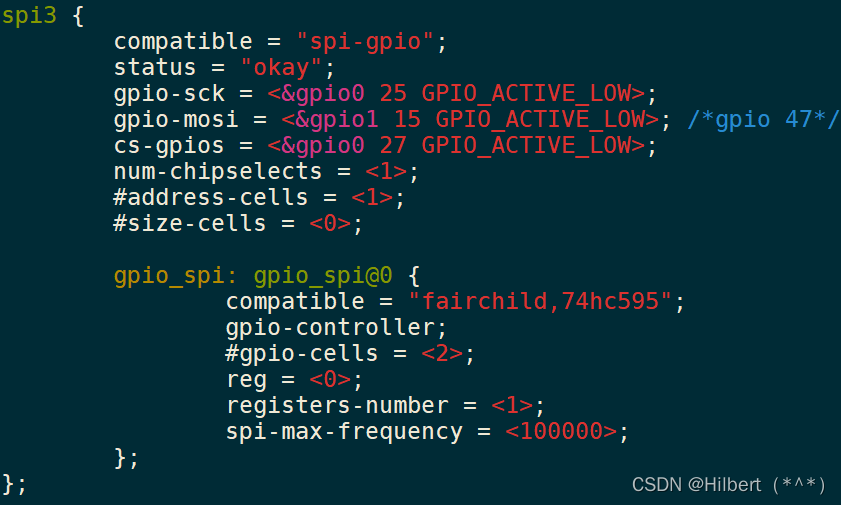
3.1 使用GPIO模拟的SPI控制器
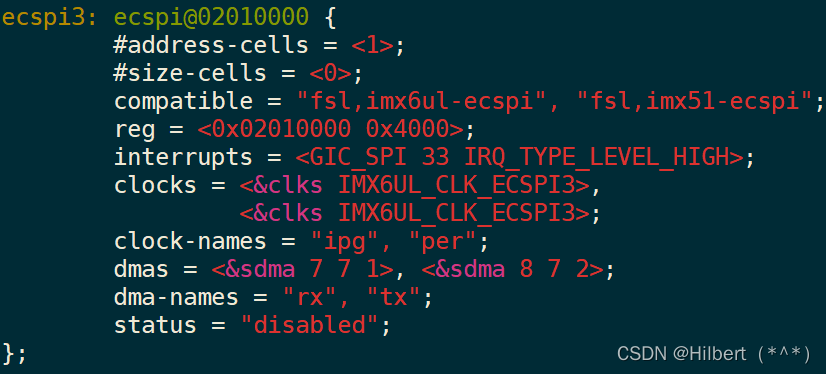
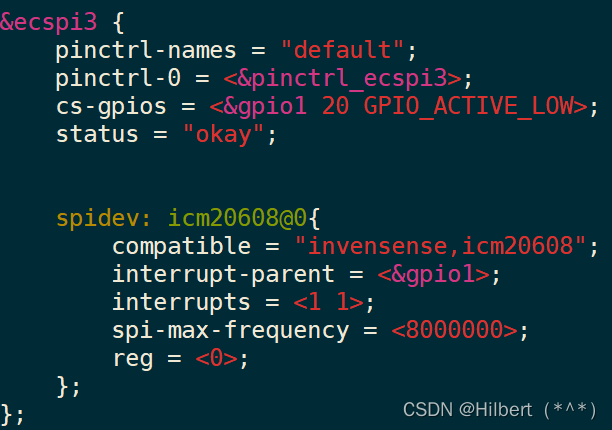
3.2 IMX6ULL SPI控制器
内核文件:arch/arm/boot/dts/imx6ull.dtsi
内核文件:arch/arm/boot/dts/100ask_imx6ull-14x14.dts
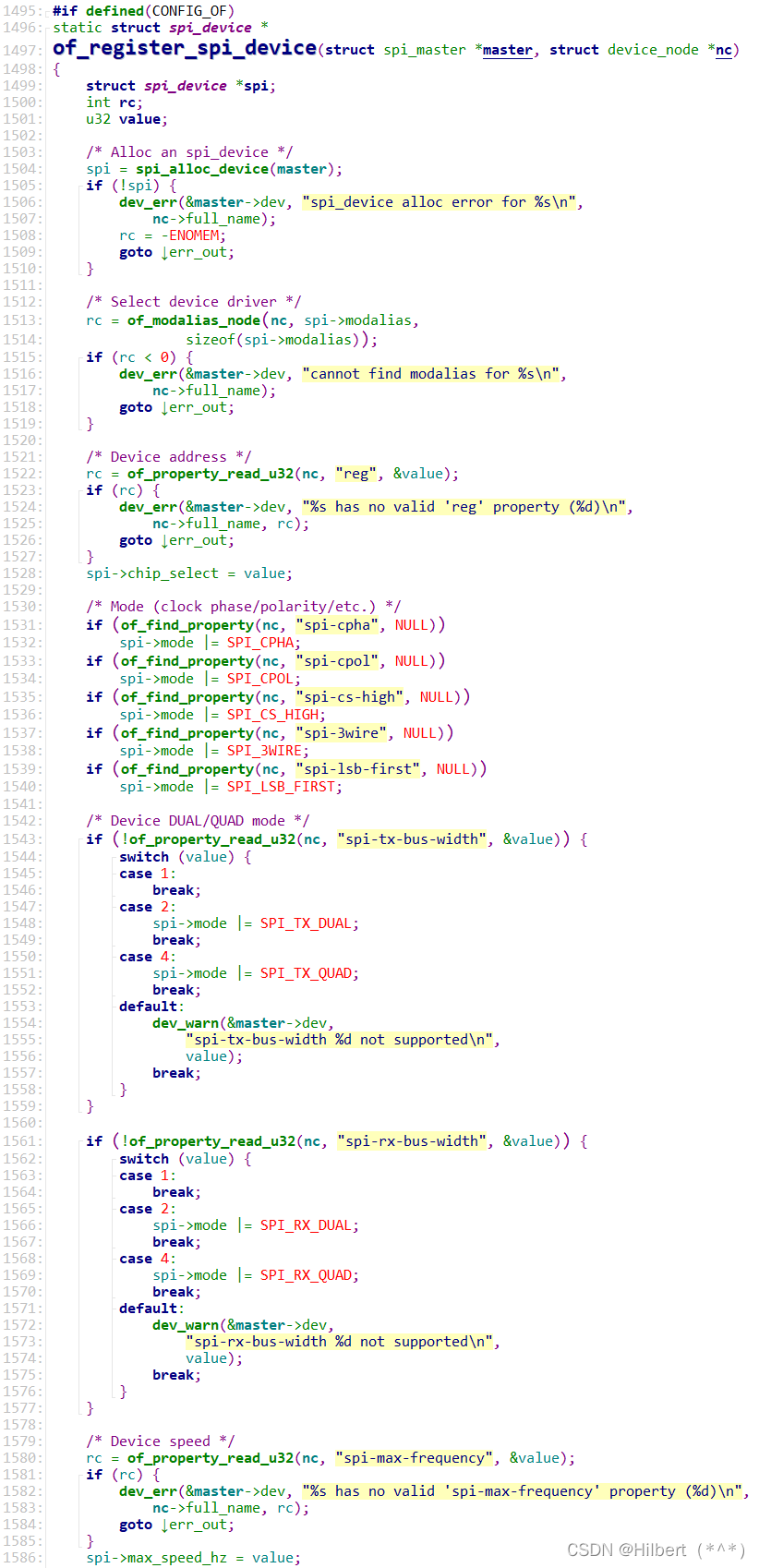
四、 设备树处理过程
内核源码:drivers\spi\spi.c
致谢
以上笔记源自
韦东山老师的视频课程,感谢韦老师,韦老师是嵌入式培训界一股清流,为嵌入式linux开发点起的星星之火,也愿韦老师桃李满园。聚是一团火,散是满天星!
在这样一个速食的时代,坚持做自己,慢下来,潜心琢磨,心怀敬畏,领悟知识,才能向下扎到根,向上捅破天,背着世界往前行!
仅此向嵌入行业里的每一个认真做技术的从业者致敬!