网络编程技术试题榆林市网站seo
为什么不用HAL库,使用HAL库捕获输入一个通道还尚可,多通道捕获由于HAL的回调函数不符合我的要求,干脆直接切换到LL库。网上找了许多,代码处理写的不符合我的要求,这里记录一下我的调试过程。
TIM2输出1路PWM信号,使用1分3杜邦线接到TIM3的CH2-CH3-CH4通道进行捕获输入。
#include "tim.h"/* TIM2 init function */
void MX_TIM2_Init(void)
{LL_TIM_InitTypeDef TIM_InitStruct = {0};LL_TIM_OC_InitTypeDef TIM_OC_InitStruct = {0};LL_GPIO_InitTypeDef GPIO_InitStruct = {0};/* Peripheral clock enable */LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM2);TIM_InitStruct.Prescaler = 63;TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;TIM_InitStruct.Autoreload = 9999;TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;LL_TIM_Init(TIM2, &TIM_InitStruct);LL_TIM_DisableARRPreload(TIM2);LL_TIM_SetClockSource(TIM2, LL_TIM_CLOCKSOURCE_INTERNAL);LL_TIM_OC_EnablePreload(TIM2, LL_TIM_CHANNEL_CH2);TIM_OC_InitStruct.OCMode = LL_TIM_OCMODE_PWM1;TIM_OC_InitStruct.OCState = LL_TIM_OCSTATE_DISABLE;TIM_OC_InitStruct.OCNState = LL_TIM_OCSTATE_DISABLE;TIM_OC_InitStruct.CompareValue = 5000;TIM_OC_InitStruct.OCPolarity = LL_TIM_OCPOLARITY_HIGH;LL_TIM_OC_Init(TIM2, LL_TIM_CHANNEL_CH2, &TIM_OC_InitStruct);LL_TIM_OC_DisableFast(TIM2, LL_TIM_CHANNEL_CH2);LL_TIM_SetTriggerOutput(TIM2, LL_TIM_TRGO_RESET);LL_TIM_DisableMasterSlaveMode(TIM2);/* USER CODE BEGIN TIM2_Init 2 *//* USER CODE END TIM2_Init 2 */LL_IOP_GRP1_EnableClock(LL_IOP_GRP1_PERIPH_GPIOB);/**TIM2 GPIO ConfigurationPB3 ------> TIM2_CH2*/GPIO_InitStruct.Pin = LL_GPIO_PIN_3;GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;GPIO_InitStruct.Alternate = LL_GPIO_AF_2;LL_GPIO_Init(GPIOB, &GPIO_InitStruct);//-------------------------------------------LL_TIM_OC_SetCompareCH2(TIM2,2000);LL_TIM_CC_EnableChannel(TIM2,LL_TIM_CHANNEL_CH2);LL_TIM_EnableCounter(TIM2);}
/* TIM3 init function */
void MX_TIM3_Init(void)
{LL_TIM_InitTypeDef TIM_InitStruct = {0};LL_GPIO_InitTypeDef GPIO_InitStruct = {0};/* Peripheral clock enable */LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM3);LL_IOP_GRP1_EnableClock(LL_IOP_GRP1_PERIPH_GPIOA);LL_IOP_GRP1_EnableClock(LL_IOP_GRP1_PERIPH_GPIOB);/**TIM3 GPIO ConfigurationPA7 ------> TIM3_CH2PB0 ------> TIM3_CH3PB1 ------> TIM3_CH4*/GPIO_InitStruct.Pin = LL_GPIO_PIN_7;GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;GPIO_InitStruct.Alternate = LL_GPIO_AF_1;LL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = LL_GPIO_PIN_0;GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;GPIO_InitStruct.Alternate = LL_GPIO_AF_1;LL_GPIO_Init(GPIOB, &GPIO_InitStruct);GPIO_InitStruct.Pin = LL_GPIO_PIN_1;GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;GPIO_InitStruct.Alternate = LL_GPIO_AF_1;LL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* TIM3 interrupt Init */NVIC_SetPriority(TIM3_IRQn, 0);NVIC_EnableIRQ(TIM3_IRQn);/* USER CODE BEGIN TIM3_Init 1 *//* USER CODE END TIM3_Init 1 */TIM_InitStruct.Prescaler = 63;TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;TIM_InitStruct.Autoreload = 65535;TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;LL_TIM_Init(TIM3, &TIM_InitStruct);LL_TIM_DisableARRPreload(TIM3);LL_TIM_SetClockSource(TIM3, LL_TIM_CLOCKSOURCE_INTERNAL);LL_TIM_SetTriggerOutput(TIM3, LL_TIM_TRGO_RESET);LL_TIM_DisableMasterSlaveMode(TIM3);LL_TIM_IC_SetActiveInput(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_ACTIVEINPUT_DIRECTTI);LL_TIM_IC_SetPrescaler(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_ICPSC_DIV1);LL_TIM_IC_SetFilter(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_IC_FILTER_FDIV1);LL_TIM_IC_SetPolarity(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_IC_POLARITY_RISING);LL_TIM_IC_SetActiveInput(TIM3, LL_TIM_CHANNEL_CH3, LL_TIM_ACTIVEINPUT_DIRECTTI);LL_TIM_IC_SetPrescaler(TIM3, LL_TIM_CHANNEL_CH3, LL_TIM_ICPSC_DIV1);LL_TIM_IC_SetFilter(TIM3, LL_TIM_CHANNEL_CH3, LL_TIM_IC_FILTER_FDIV1);LL_TIM_IC_SetPolarity(TIM3, LL_TIM_CHANNEL_CH3, LL_TIM_IC_POLARITY_RISING);LL_TIM_IC_SetActiveInput(TIM3, LL_TIM_CHANNEL_CH4, LL_TIM_ACTIVEINPUT_DIRECTTI);LL_TIM_IC_SetPrescaler(TIM3, LL_TIM_CHANNEL_CH4, LL_TIM_ICPSC_DIV1);LL_TIM_IC_SetFilter(TIM3, LL_TIM_CHANNEL_CH4, LL_TIM_IC_FILTER_FDIV1);LL_TIM_IC_SetPolarity(TIM3, LL_TIM_CHANNEL_CH4, LL_TIM_IC_POLARITY_RISING);/* USER CODE BEGIN TIM3_Init 2 */LL_TIM_EnableIT_UPDATE(TIM3);//更新中断使能LL_TIM_EnableIT_CC2(TIM3);//捕获通道2使能LL_TIM_EnableIT_CC3(TIM3);//捕获通道3使能LL_TIM_EnableIT_CC4(TIM3);//捕获通道4使能LL_TIM_CC_EnableChannel(TIM3,LL_TIM_CHANNEL_CH2);//通道2使能LL_TIM_CC_EnableChannel(TIM3,LL_TIM_CHANNEL_CH3);//通道3使能LL_TIM_CC_EnableChannel(TIM3,LL_TIM_CHANNEL_CH4);//通道4使能LL_TIM_EnableCounter(TIM3);/* USER CODE END TIM3_Init 2 */}uint32_t TIM3_OverCnt = 0;
int32_t Value_Temp2 = 0;
int32_t Value_Temp3 = 0;
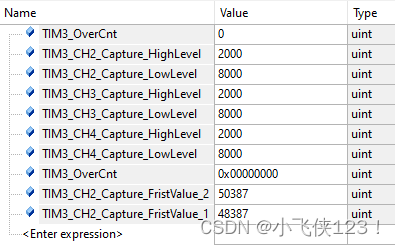
int32_t Value_Temp4 = 0;uint32_t TIM3_CH2_Capture_FristValue_1;
uint32_t TIM3_CH2_Capture_FristValue_2;
uint32_t TIM3_CH2_Capture_FristValue_3;
uint32_t TIM3_CH2_Capture_HighLevel;
uint32_t TIM3_CH2_Capture_LowLevel;
uint8_t TIM3_CH2_CaptureNumber;
//uint32_t TIM3_CH2_Freq = 0;
//float TIM3_CH2_Duty = 0;uint32_t TIM3_CH3_Capture_FristValue_1;
uint32_t TIM3_CH3_Capture_FristValue_2;
uint32_t TIM3_CH3_Capture_FristValue_3;
uint32_t TIM3_CH3_Capture_HighLevel;
uint32_t TIM3_CH3_Capture_LowLevel;
uint8_t TIM3_CH3_CaptureNumber;
//uint32_t TIM3_CH3_Freq = 0;
//float TIM3_CH3_Duty = 0;uint32_t TIM3_CH4_Capture_FristValue_1;
uint32_t TIM3_CH4_Capture_FristValue_2;
uint32_t TIM3_CH4_Capture_FristValue_3;
uint32_t TIM3_CH4_Capture_HighLevel;
uint32_t TIM3_CH4_Capture_LowLevel;
uint8_t TIM3_CH4_CaptureNumber;void TIM3_CallBack(void)
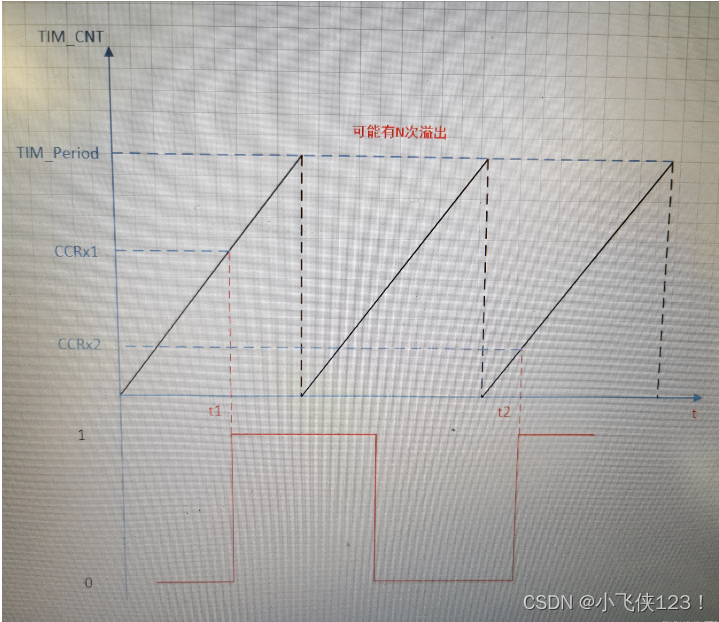
{ //------------------------------------------CC2if(LL_TIM_IsActiveFlag_CC2(TIM3)){ LL_TIM_ClearFlag_CC2(TIM3);if(TIM3_CH2_CaptureNumber == 0){TIM3_OverCnt = 0;TIM3_CH2_CaptureNumber = 1;
// LL_TIM_SetCounter(TIM3,0); }elseif(TIM3_CH2_CaptureNumber == 1){ TIM3_CH2_Capture_FristValue_1 = LL_TIM_IC_GetCaptureCH2(TIM3); // 获取当前的捕获值. 即CCRx2 //设置下降沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH2,LL_TIM_IC_POLARITY_FALLING); TIM3_CH2_CaptureNumber = 2;TIM3_OverCnt = 0; }elseif(TIM3_CH2_CaptureNumber == 2){TIM3_CH2_Capture_FristValue_2 = LL_TIM_IC_GetCaptureCH2(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH2_Capture_HighLevel = TIM3_OverCnt * 65535 + TIM3_CH2_Capture_FristValue_2 - TIM3_CH2_Capture_FristValue_1; }else{Value_Temp2 = TIM3_CH2_Capture_FristValue_2 - TIM3_CH2_Capture_FristValue_1;Value_Temp2 = Value_Temp2>0?Value_Temp2:0; TIM3_CH2_Capture_HighLevel = TIM3_OverCnt * 65535 + Value_Temp2;} //设置上升沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH2,LL_TIM_IC_POLARITY_RISING); TIM3_CH2_CaptureNumber = 3;TIM3_OverCnt = 0;}elseif(TIM3_CH2_CaptureNumber == 3){TIM3_CH2_Capture_FristValue_3 = LL_TIM_IC_GetCaptureCH2(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){TIM3_CH2_Capture_LowLevel = TIM3_OverCnt * 65535 + TIM3_CH2_Capture_FristValue_3 - TIM3_CH2_Capture_FristValue_2; }else{Value_Temp2 = TIM3_CH2_Capture_FristValue_3 - TIM3_CH2_Capture_FristValue_2;Value_Temp2 = Value_Temp2>0?Value_Temp2:0;TIM3_CH2_Capture_LowLevel = TIM3_OverCnt * 65535 + Value_Temp2; }// //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH2,LL_TIM_IC_POLARITY_FALLING); TIM3_CH2_CaptureNumber = 4;TIM3_OverCnt = 0;} elseif(TIM3_CH2_CaptureNumber == 4){// //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH2,LL_TIM_IC_POLARITY_RISING); TIM3_CH2_CaptureNumber = 1;TIM3_OverCnt = 0;} } //------------------------------------------CC3if(LL_TIM_IsActiveFlag_CC3(TIM3)){ LL_TIM_ClearFlag_CC3(TIM3);if(TIM3_CH3_CaptureNumber == 0){TIM3_OverCnt = 0;TIM3_CH3_CaptureNumber = 1;
// LL_TIM_SetCounter(TIM3,0); }elseif(TIM3_CH3_CaptureNumber == 1){TIM3_OverCnt = 0;TIM3_CH3_Capture_FristValue_1 = LL_TIM_IC_GetCaptureCH3(TIM3); // 获取当前的捕获值. 即CCRx2 //设置下降沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH3,LL_TIM_IC_POLARITY_FALLING); TIM3_CH3_CaptureNumber = 2; }elseif(TIM3_CH3_CaptureNumber == 2){TIM3_CH3_Capture_FristValue_2 = LL_TIM_IC_GetCaptureCH3(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH3_Capture_HighLevel = TIM3_OverCnt * 65535 + TIM3_CH3_Capture_FristValue_2 - TIM3_CH3_Capture_FristValue_1; } else{Value_Temp3 = TIM3_CH3_Capture_FristValue_2 - TIM3_CH3_Capture_FristValue_1;Value_Temp3 = Value_Temp3>0?Value_Temp3:0; TIM3_CH3_Capture_HighLevel = TIM3_OverCnt * 65535 + Value_Temp3;} //设置上升沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH3,LL_TIM_IC_POLARITY_RISING); TIM3_CH3_CaptureNumber = 3;TIM3_OverCnt = 0;}elseif(TIM3_CH3_CaptureNumber == 3){TIM3_CH3_Capture_FristValue_3 = LL_TIM_IC_GetCaptureCH3(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH3_Capture_LowLevel = TIM3_OverCnt * 65535 + TIM3_CH3_Capture_FristValue_3 - TIM3_CH3_Capture_FristValue_2; } else{Value_Temp3 = TIM3_CH3_Capture_FristValue_3 - TIM3_CH3_Capture_FristValue_2;Value_Temp3 = Value_Temp3>0?Value_Temp3:0; TIM3_CH3_Capture_LowLevel = TIM3_OverCnt * 65535 + Value_Temp3;} // //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH3,LL_TIM_IC_POLARITY_FALLING); TIM3_CH3_CaptureNumber = 4;TIM3_OverCnt = 0;} elseif(TIM3_CH3_CaptureNumber == 4){// //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH3,LL_TIM_IC_POLARITY_RISING); TIM3_CH3_CaptureNumber = 1;TIM3_OverCnt = 0;} }//------------------------------------------CC4if(LL_TIM_IsActiveFlag_CC4(TIM3)){ LL_TIM_ClearFlag_CC4(TIM3);if(TIM3_CH4_CaptureNumber == 0){TIM3_OverCnt = 0;TIM3_CH4_CaptureNumber = 1;
// LL_TIM_SetCounter(TIM3,0); }elseif(TIM3_CH4_CaptureNumber == 1){TIM3_OverCnt = 0;TIM3_CH4_Capture_FristValue_1 = LL_TIM_IC_GetCaptureCH4(TIM3); // 获取当前的捕获值. 即CCRx2 //设置下降沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH4,LL_TIM_IC_POLARITY_FALLING); TIM3_CH4_CaptureNumber = 2;}elseif(TIM3_CH4_CaptureNumber == 2){TIM3_CH4_Capture_FristValue_2 = LL_TIM_IC_GetCaptureCH4(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH4_Capture_HighLevel = TIM3_OverCnt * 65535 + TIM3_CH4_Capture_FristValue_2 - TIM3_CH4_Capture_FristValue_1; } else{Value_Temp4 = TIM3_CH4_Capture_FristValue_2 - TIM3_CH4_Capture_FristValue_1;Value_Temp4 = Value_Temp4>0?Value_Temp4:0; TIM3_CH4_Capture_HighLevel = TIM3_OverCnt * 65535 + Value_Temp4;} //设置上升沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH4,LL_TIM_IC_POLARITY_RISING); TIM3_CH4_CaptureNumber = 3;TIM3_OverCnt = 0;}elseif(TIM3_CH4_CaptureNumber == 3){TIM3_CH4_Capture_FristValue_3 = LL_TIM_IC_GetCaptureCH4(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH4_Capture_LowLevel = TIM3_OverCnt * 65535 + TIM3_CH4_Capture_FristValue_3 - TIM3_CH4_Capture_FristValue_2; } else{Value_Temp4 = TIM3_CH4_Capture_FristValue_3 - TIM3_CH4_Capture_FristValue_2;Value_Temp4 = Value_Temp4>0?Value_Temp4:0; TIM3_CH4_Capture_LowLevel = TIM3_OverCnt * 65535 + Value_Temp4; } // //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH4,LL_TIM_IC_POLARITY_FALLING); TIM3_CH4_CaptureNumber = 4;TIM3_OverCnt = 0;} elseif(TIM3_CH4_CaptureNumber == 4){// //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH4,LL_TIM_IC_POLARITY_RISING); TIM3_CH4_CaptureNumber = 1;TIM3_OverCnt = 0;} } //------------------------------------------Updateif(LL_TIM_IsActiveFlag_UPDATE(TIM3)){ LL_TIM_ClearFlag_UPDATE(TIM3); //每次溢出时间为65536usTIM3_OverCnt++;}}#ifndef __TIM_H__
#define __TIM_H__#ifdef __cplusplus
extern "C" {
#endif/* Includes ------------------------------------------------------------------*/
#include "main.h"void MX_TIM2_Init(void);
void MX_TIM3_Init(void);
void TIM3_CallBack(void);#ifdef __cplusplus
}
#endif#endif /* __TIM_H__ */#include "main.h"
#include "tim.h"
#include "gpio.h"void SystemClock_Config(void);int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_TIM2_Init();MX_TIM3_Init();while (1){}}/*** @brief This function handles TIM3 global interrupt.*/
void TIM3_IRQHandler(void)
{TIM3_CallBack();}