做网站外包哪家好南宁推广软件
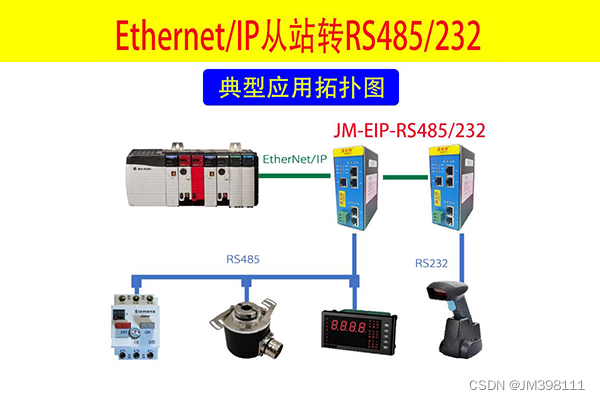
你是否曾经遇到过这样的问题:如何将ETHERNET/IP网络和RS485/RS232总线连接起来呢?捷米的JM-EIP-RS485/232通讯网关,自主研发的ETHERNET/IP从站功能,完美解决了这个难题。这款网关不仅可以将ETHERNET/IP网络和RS485/RS232总线连接起来,还可以在ETHERNET/IP网络中作为从站使用,在RS485/RS232网络中则可以作为主站或从站使用。
1.1 技术参数
1.1.1 ETHERNET/IP 技术参数
● 网关做为 ETHERNET/IP 网络的从站,可以连接 AB(罗克韦尔)、欧姆龙等品牌的 PLC。
● 以太网 10/100M 自适应,具有 IP 地址冲突探测功能。
● 支持 ODVA 标准 EtherNet/IP 通信协议。
● 输入输出字节数:输入字节数最大 490 Bytes、输出字节数最大 490 Bytes。
1.1.2 RS485/RS232 技术参数
● RS485/RS232 波特率可以选择:9600、19.2K、38.4K、115.2K 等。
● 字符格式及校验:8 位无校验、8 位+偶校验、8 位+奇校验、7 位+2 停止位+ 偶校验、7 位+1 停止位+奇校验、7 位+2 停止位+无校验、9 位+1 停止位+无校验。
● 自动定时发送功能,定时发送间隔时间从 10 毫秒到 60 秒可设置。
● 有两种控制接收结束的方式:
⑴ 按字符间隔接收:当接收到一个字符后连续 3.5 个字符时间(与波特率、字符位数和有无校验有关)没有接收到下一个字符时,认为报文结束。
⑵ 按长度接收:按照用户给定的接收报文长度来控制接收报文结束。
2. 硬件电气规范
2.1 电气参数
◆ 电源:直流 24V/200mA(18V~30V 可用),使用中建议接好保护地 PE
◆ 工作环境:-25~55℃,湿度≤95%
◆ 防护等级:IP20
◆ 安装方式:35mm 导轨
◆ 重量:500g
2.2 ETHERNET/IP 的电气连接

ETHERNET/IP 采用标准的 T568B 接法,支持直连和交叉接线方式,如上图所示。ETHERNET/IP 只需要连接以太网的 1、 2、 3、 6 这四根信号线即可实现通讯。用户需注意以太网线的屏蔽层连接良好。
2.3 串行接口的电气连接
2.3.1 RS485 电气连接

使用 RS485 通讯时,所有设备的信号 A 连接到一起,信号 B 连接到一起。
当需要使用终端电阻时,可以将网关端子的 B 与 TR 短接到一起。
2.3.2 RS232 电气连接
| 引脚 功能 | 引脚 功能 | |||
| 1 2 3 4 5 6 |
TX RX GND |
| 1 2 3 4 5 6 7 8 9 | RX TX
GND |
|
| ||||
|
| ||||
网关 被连设备(计算机)
使用 RS232 通讯时,信号传输是单向的,请注意与对端设备的连接线序。网关的 TX 接对端设备的 RX,网关的 RX 接对端设备的 TXD,两端的 GND 连到一起。
3. 协议及数据转换
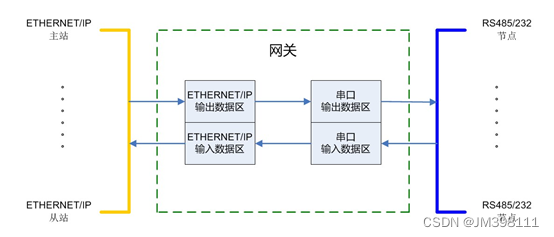
3.1 协议转换原理
网关分别从 ETHERNET/IP 一侧和 RS485/RS232 一侧读写数据,存入各自的缓冲区,网关内部将缓冲区的数据进行交换,从而实现两边数据的传输。
3.2 ETHERNET/IP 协议介绍
EtherNet/IP 是由罗克韦尔自动化公司开发的工业以太网通讯协定,由 ODVA
(ODVA)管理,可应用在程序控制及其他自动化的应用中,是通用工业协定(CIP)中的一部分。

EtherNet/IP 是一种适合于工业环境和对时间要求比较苛刻的应用的网络。
EtherNet/IP 使用标准的以太网、TCP/IP 技术和一种名叫 CIP(Control and
Information Protocol)的开放性应用层协议。
EtherNet/IP 将以太网的设备以预定义的设备种类加以分类,每种设备有其特别的行为,此外,EtherNet/IP 设备可以:
● 用户数据报协议(UDP)的隐式报文传送基本 I/O 资料。
● 用传输控制协议(TCP)的显式报文上传或下载参数、设定值、程式或配方。
●
● 用主站轮询、从站周期性更新或是状态改变(COS)时更新的方式,方便主站监控从站的状态,讯息会用 UDP 的报文送出。
● 用一对一、一对多或是广播的方式,透过用 TCP 的报文送出资料。
● EtherNet/IP 使用 TCP 埠编号 44818 作为显式报文的处理,UDP 埠编号2222 作为隐式报文的处理。
● 捷米的JM-EIP-RS485/232通讯网关,让你的网络连接更加便捷高效,快来评论区留下你的看法,让我们一起探讨网络连接的未来!