win2003做网站杭州百度竞价推广公司
1 概述
1.1 自动泊车系统研究现状
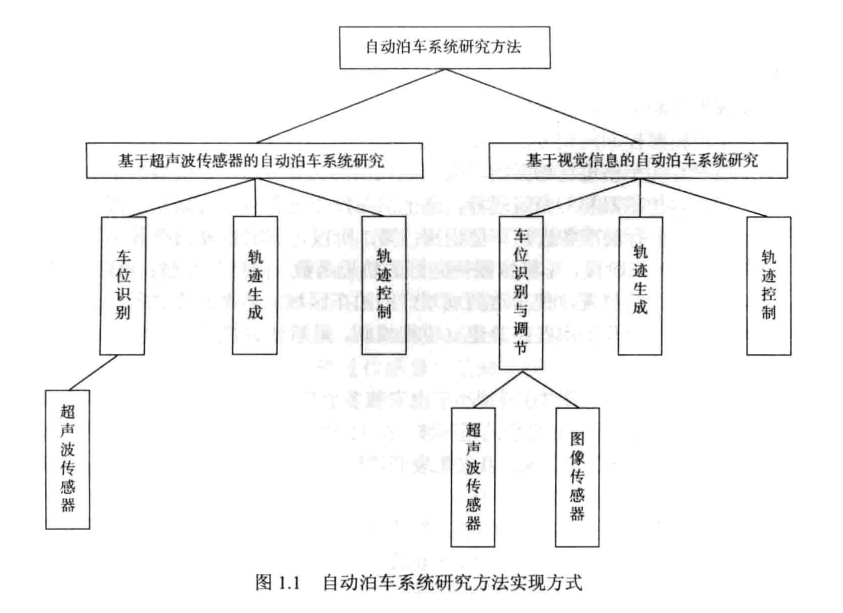
目前对于自动泊车系统的研究方法通常有两种实现方式:
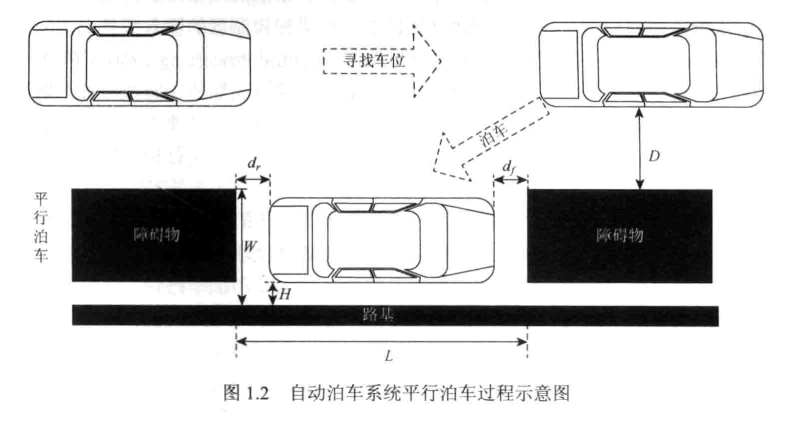
整个泊车操作可以分为四个阶段:第一阶段车辆向前行驶进行车位识别,第二阶段车辆行驶到准备泊车时的待泊车区域,第三阶段车辆按照规划好的轨迹函数,向车位行驶,第四阶段,车辆调整泊车后的未知,使其达到规划好的泊车区域。
对于轨迹控制,目前的研究方法主要分为两类:一种是基于路径规划进行泊车操作,另一种是通过驾驶员的泊车经验,对其建立模糊规则,设计一种模糊控制器。
1.2 自动泊车系统原理及架构
自动泊车系统是一种能够快速、安全地使车辆自动驶入泊车位的智能泊车辅助系统,它通过超声波和图像传感器感知车辆周围环境信息来识别泊车车位,并根据车辆与停车位的相对未知信息,产生相应的泊车轨迹来控制车辆的速度和方向盘转向完成自动泊车。
自动泊车系统具有以下基本功能:自动识别车位功能、车位调节功能、基于整车参数的路径生成功能,具有基于路径规划的轨迹控制功能,具有车速控制功能。
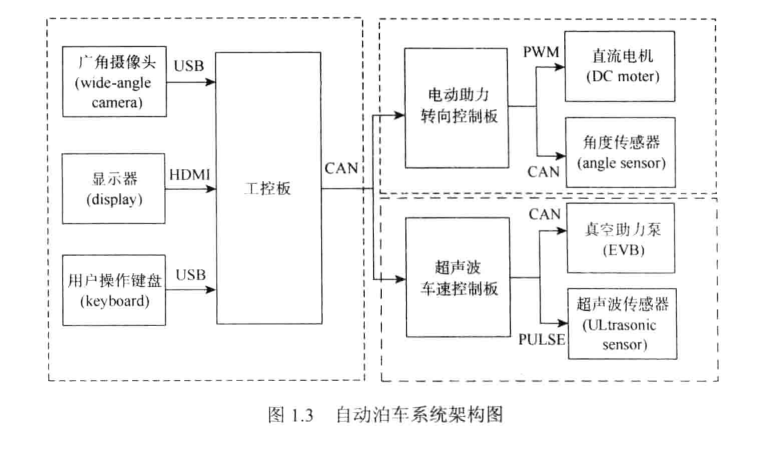
以工控板为核心的整车控制单元和图像处理单元,以电动助力转向控制板为核心的转向控制单元,以超声波车速控制板为核心的车位识别和车速控制单元。
超速波控制系统实现车位和障碍物检测;图像处理系统实现车位调节,实现虚拟车位和实际车位之间的匹配;
自动泊车系统主要由环境数据采集系统、中央处理器、车辆策略控制系统三部分组成。
中央处理器的任务:接受感知信息,计算参考泊车轨迹,将车速和前轮转角信号传递给策略控制系统。
1.3 自动泊车系统核心技术
超声波精确测距技术、车位识别技术、车位调节技术、轨迹生成技术、EPS转向控制技术和车辆低速控制技术。
2 车速控制目标
2.1 低速控制意义和目标
由于自动泊车系统在泊车过程中会不断变动车身角度以修正车身未知,所以需要车辆在任意方向盘转向角度下均能稳定跟踪期望车速行驶。
速度控制品质的好坏即是否能保证车辆在任意方向盘角度下保持期望速度行驶。
衡量速度控制算法的好坏的性能标准主要包括调节实践、速度轨迹跟踪误差和跟踪过程中的加速度。
低速控制算法需要在控制速度的过程中保证具有较短的调节时间和较小的轨迹跟踪误差,还需要注重控制过程中的加速度大小即驾驶员和乘客的舒适性。
车辆低速控制的特点和难点是控制对象范围小,且精度高,此外从实际应用角度考虑,还需要保证驾驶员的舒适性。
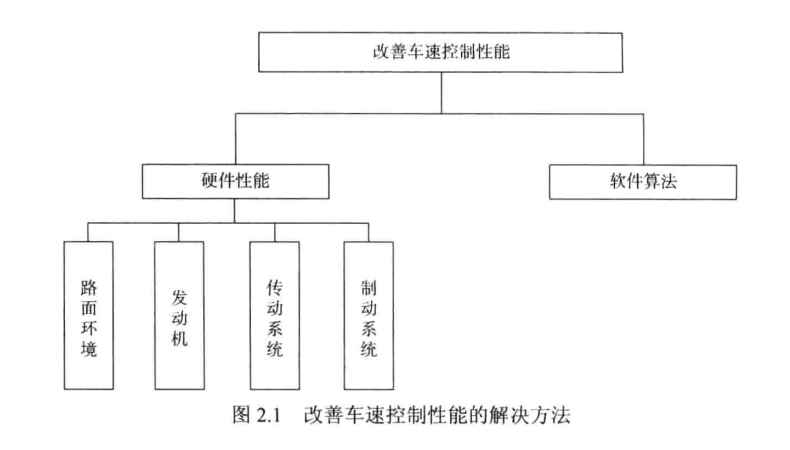
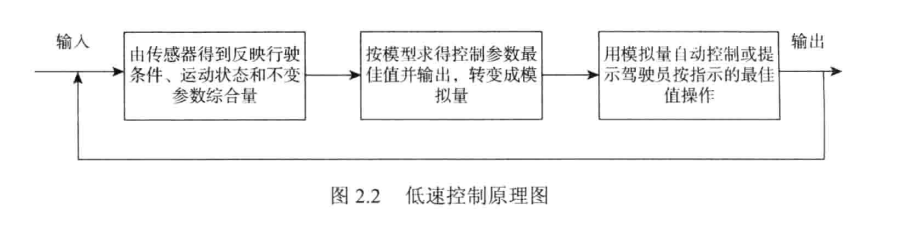
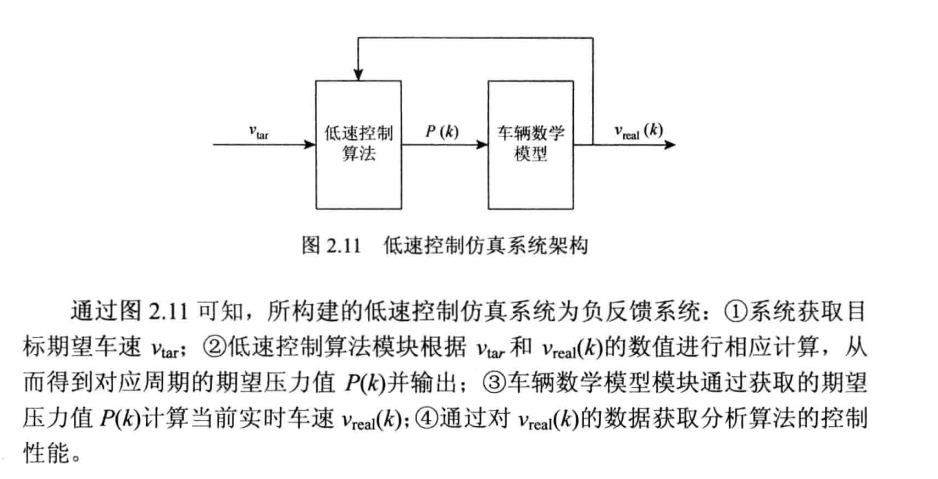
2.2 低速控制原理及架构
低速控制技术包含横向控制和纵向控制两部分。
横向控制和纵向控制的控制原理基本一致:首先,通过传感器获得周围环境变量的反馈值;然后,利用算法决策出最佳值并输出为模拟量;最后,通过模拟量自动控制车辆的相关系统或提示驾驶员按照提示的最佳值进行操作。

对于全自动泊车系统的低速控制过程中,由于速度较低所以轮胎的滑移率较小,且转向角度的变化较小,对整个系统的影响不大,因此整个车辆可以简化为纵向模型。
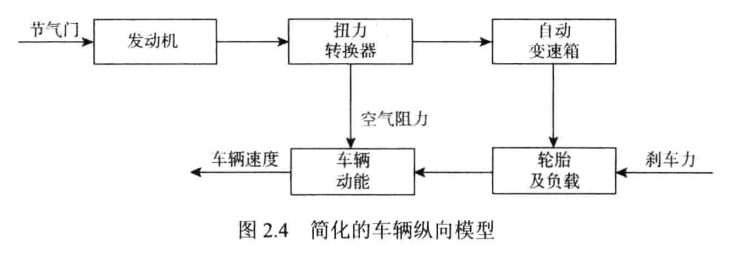
系统的特征变量是车辆的行进速度。
采用后轴中心处的轮速作为全自动泊车系统的特征变量。(与车辆中心处的车速偏差较小,且能反应车辆的运动过程;可直接通过轮速传感器获得;计算简单且不需要考虑转向的角度)
全自动泊车系统的速度可分为三个状态,即加速、恒速和减速状态。
系统利用拉普拉斯-高斯曲线规划实时期望车速轨迹。
采用斜率为2的斜坡函数规划减速状态下的速度规划。

采用具有自适应参数的Fuzzy算法结合增量式PID算法作为车辆低速控制的核心算法。

3 车位识别系统
3.1 车位识别意义及目标
一种高效可靠的车位识别方法应该能够识别各种复杂泊车环境下的泊车位,并在识别成功率、识别精度方面都能够满足泊车需求,为整个泊车系统的成功实施奠定一个监视的基础。
引入一种基于多超声波传感器信息融合的车位识别方法,通过安装于车身同侧的两个超声波传感器对目标车位进行识别,利用相似度数据融合方法对传感器识别数据进行融合,最后得到一个加权的目标车位估计值作为最后评估的对象。
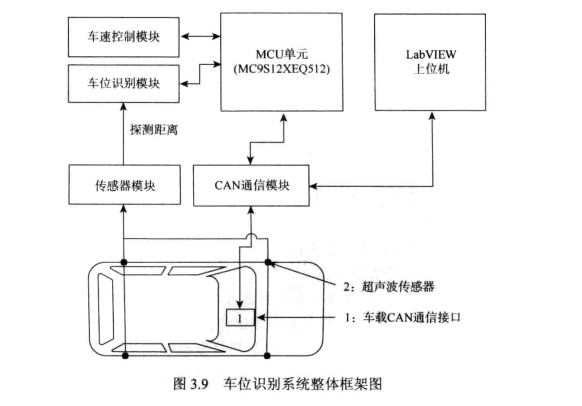
3.2 车位识别原理及架构
车位识别模式分为理想泊车模式和特殊泊车模式。
车位识别算法:超声波测距和车位边缘检测。
4 车位调节系统
4.1 车位调节意义及目标
通过在车辆尾部安装摄像头,通过摄像头采集的环境信息构建泊车车位操作的人机交互界面,通过人机交互界面驾驶员一方面可以清楚地观察车后环境,另一方面可以通过调节人机交互界面中的虚拟车位进行待泊车区域选择。驾驶员在泊车过程中能够了解泊车时的车后环境情况和完成泊车时车辆的泊车位置。而且可以为自动泊车系统的关键技术包括轨迹生成和轨迹控制提供精确的输入参数(轨迹生成主要根据系统提供的车辆于车位之间的横向距离与纵向距离进行规划),从而实现泊车的控制。
车位调节算法设计:根据实际坐标与图像坐标之间的关系,在图像中生成一个与实际车位大小相同的虚拟车位。通过在图像中调节虚拟车位的位置,便能够实现与不同环境下实际车位之间的匹配。
5 轨迹生成与转向控制系统
从一定程度上来说,轨迹生成技术和转向控制技术直接决定了一个自动泊车系统的有效性和可靠性。
一个好的轨迹生成算法,能够提高系统的鲁棒性和稳定性,提高泊车的成功率和扩大初始泊车范围,使驾驶员能够更随心所欲的进行泊车。转向控制系统需要与其他部件协调合作,让汽车在恰当的时刻实现精确角度的转向,其能否快速、精确地实现汽车转向,决定了泊车轨迹的质量。
5.1 轨迹生成与转向原理及架构
根据运动学模型中的坐标位置的几何关系,可进一步求得车辆四个车轮和车身顶点对应的轨迹方程。
车辆在进行泊车操作时,其运动轨迹为一段圆弧叠加而成。车辆运动过程中,驾驶员通过方向盘来控制车辆行进的轨迹,所以需对车辆行驶时其运动半径和方向盘转角之间的关系进行分析。为减轻轮胎的磨损,在设计汽车时要求其转向系统保证汽车在进行转向操作时车辆进行纯滚动运动。只有在所有车轮转向轴线交于一点时此条件才成立,此交点称为转向中心。
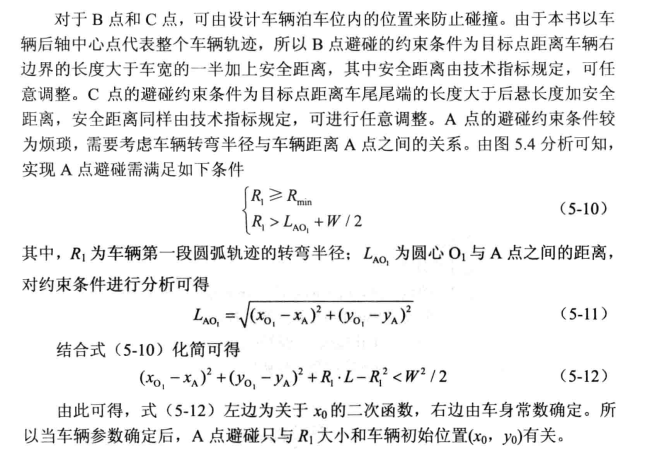
5.2 车辆避碰空间分析
泊车过程中的碰撞区域主要由车位环境决定。

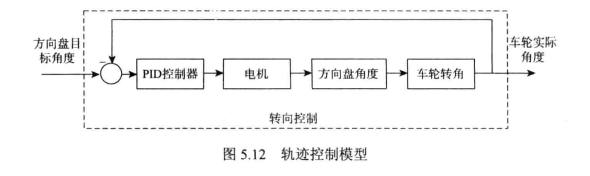
采用增量式PID控制方法控制方向盘角度。
5.3 轨迹生成与转向控制设计
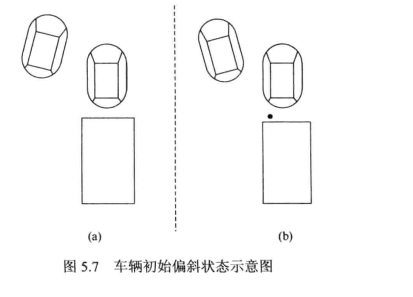
在实际泊车过程中,驾驶员在准备泊车时,很难将车辆停得与车位处于绝对平行的状态,并且由驾驶员选择一个相对精确的泊车位置有一定的难度。