网站前端怎么做方法如何做好网络销售技巧
机器人仿真软件 各类免费的的机器人仿真软件优缺点汇总_robot 仿真 软件收费么_dyannacon的博客-CSDN博客
课程地址 https://class.guyuehome.com/p/t_pc/course_pc_detail/column/p_605af87be4b007b4183a42e7
课程资料 guyueclass: 古月学院课程代码
旋转变换 旋转的左乘与右乘 - 知乎
四足机器人站立控制原理 【基础知识】四足机器人的站立姿态控制原理 - 知乎
单腿逆解参考 https://github.com/richardbloemenkamp/Robotdog
Vrep文档

Vrep放大object

Vrep 导入模型步骤:
1. plugins-->urdf import导入机器人URDF文件
2. 删除机器人对象中的world_joint和world_link_visual
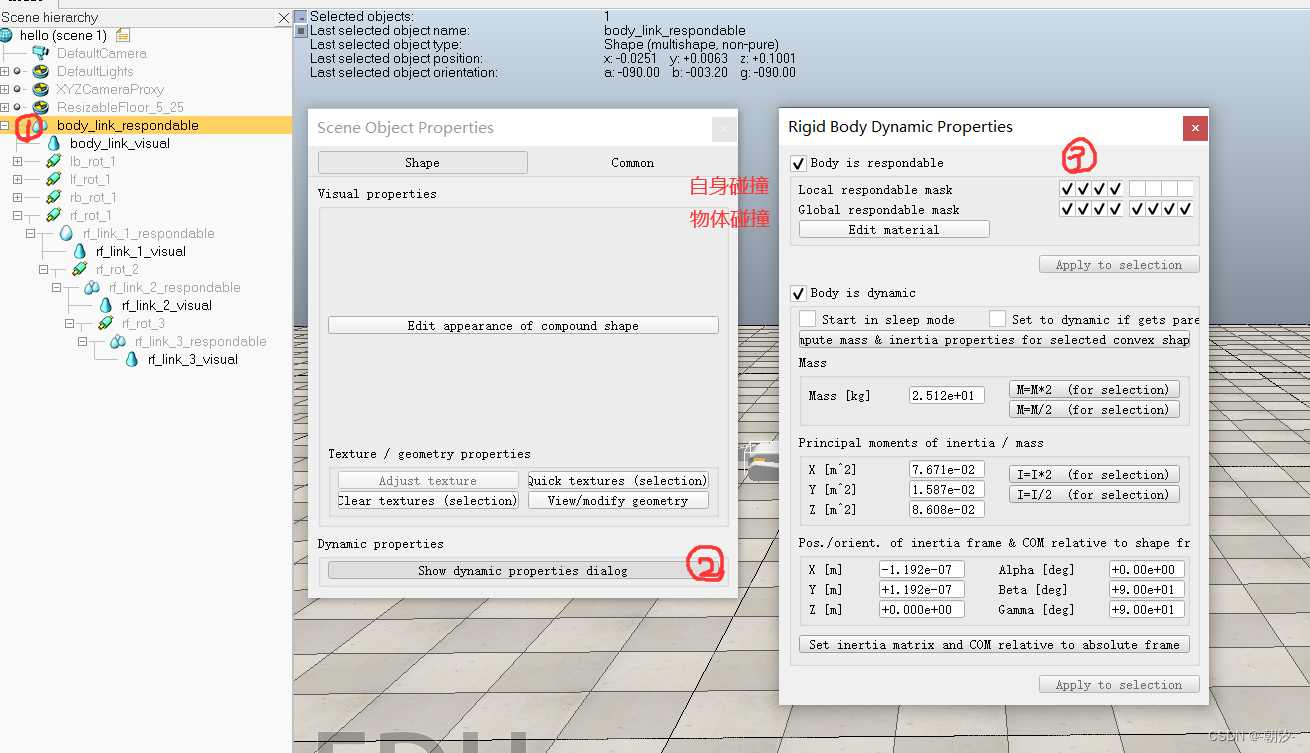
3. 双击设置机器人参数
碰撞参数设置:body参数设置,自身碰撞勾选前四个勾,leg参数设置,自身碰撞勾选后四个勾,即不计算与自身的碰撞关系
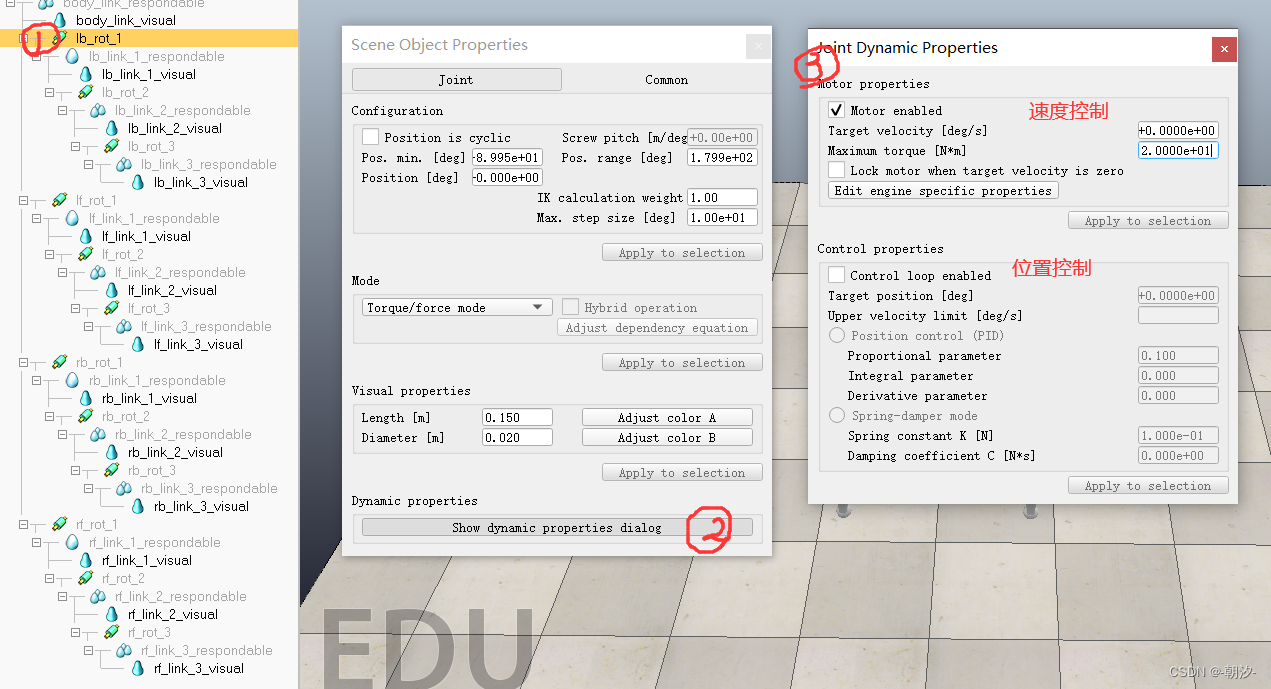
设置关节参数
调节颜色

python联合仿真
remote API路径:C:\Program Files\CoppeliaRobotics\CoppeliaSimEdu\programming\remoteApiBindings
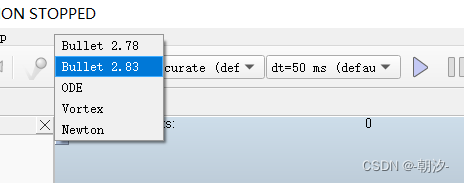
1. 选择仿真器
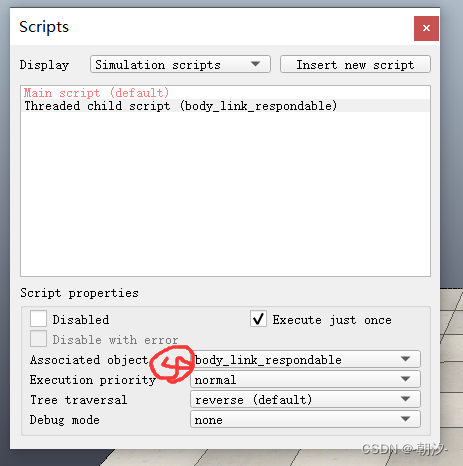
2. 创建Vrep脚本用于远程连接

3. 绑定脚本到机器人
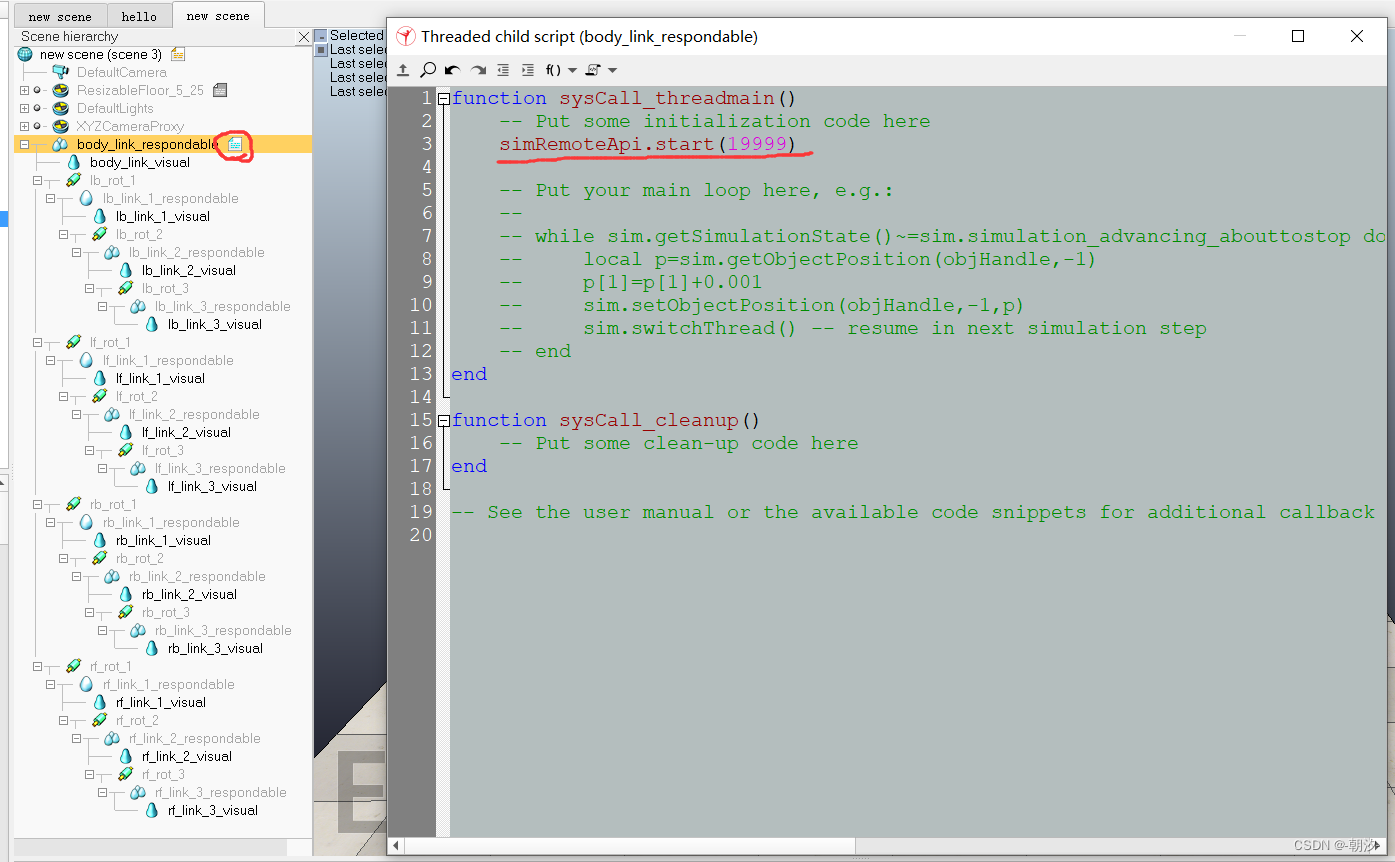
4. 编辑脚本,添加远程连接代码
4. 编写python脚本并测试(将腿部足端位置转换为关节的角度)
连接V-REP需要从remote API路径拷贝相关文件
"""
连接VREP Server并测试控制四足机器人
"""
try:import sim
except ImportError:print('--------------------------------------------------------------')print('"sim.py" could not be imported. This means very probably that')print('either "sim.py" or the remoteApi library could not be found.')print('Make sure both are in the same folder as this file,')print('or appropriately adjust the file "sim.py"')print('--------------------------------------------------------------')print('')sim = Noneimport time
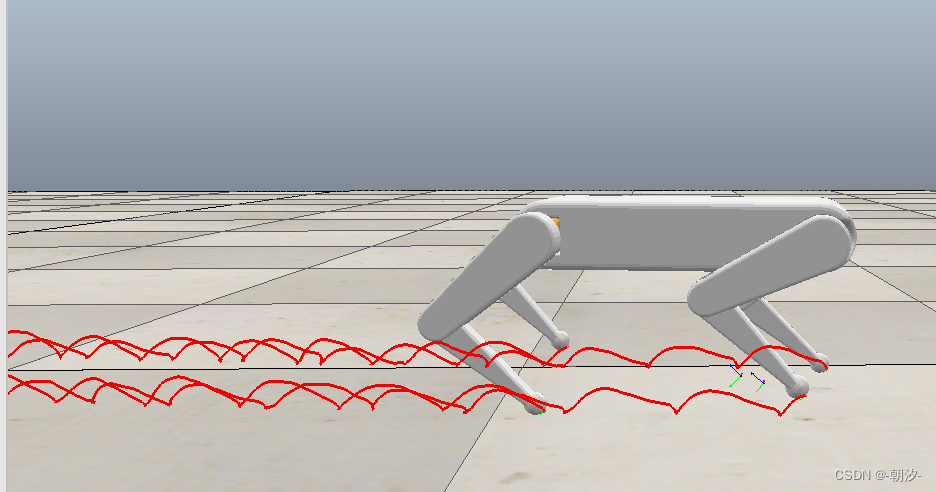
import numpy as npdef start_simulation():sim.simxFinish(-1)# 开启套接字与server进行通信clientID = sim.simxStart('127.0.0.1', 19999, True, True, 5000, 5)if clientID != -1:print('Connected to remote API server with ClientID ', clientID)# 开始模拟sim.simxStartSimulation(clientID, sim.simx_opmode_oneshot)return clientIDelse:return -1def get_joints(client_id):# 机器人电机力矩参数rotation_forces = [# RB[500, 500, 500],# RF[500, 500, 500],# LB[500, 500, 500],# LF[500, 500, 500]]# 获取机器人关节对象句柄rec, rb_rot_1 = sim.simxGetObjectHandle(client_id, 'rb_rot_1', sim.simx_opmode_blocking)rec, rb_rot_2 = sim.simxGetObjectHandle(client_id, 'rb_rot_2', sim.simx_opmode_blocking)rec, rb_rot_3 = sim.simxGetObjectHandle(client_id, 'rb_rot_3', sim.simx_opmode_blocking)rec, rf_rot_1 = sim.simxGetObjectHandle(client_id, 'rf_rot_1', sim.simx_opmode_blocking)rec, rf_rot_2 = sim.simxGetObjectHandle(client_id, 'rf_rot_2', sim.simx_opmode_blocking)rec, rf_rot_3 = sim.simxGetObjectHandle(client_id, 'rf_rot_3', sim.simx_opmode_blocking)rec, lb_rot_1 = sim.simxGetObjectHandle(client_id, 'lb_rot_1', sim.simx_opmode_blocking)rec, lb_rot_2 = sim.simxGetObjectHandle(client_id, 'lb_rot_2', sim.simx_opmode_blocking)rec, lb_rot_3 = sim.simxGetObjectHandle(client_id, 'lb_rot_3', sim.simx_opmode_blocking)rec, lf_rot_1 = sim.simxGetObjectHandle(client_id, 'lf_rot_1', sim.simx_opmode_blocking)rec, lf_rot_2 = sim.simxGetObjectHandle(client_id, 'lf_rot_2', sim.simx_opmode_blocking)rec, lf_rot_3 = sim.simxGetObjectHandle(client_id, 'lf_rot_3', sim.simx_opmode_blocking)# 设置电机力矩rec = sim.simxSetJointForce(client_id, rb_rot_1, rotation_forces[0][0], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rb_rot_2, rotation_forces[0][1], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rb_rot_3, rotation_forces[0][2], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rf_rot_1, rotation_forces[1][0], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rf_rot_2, rotation_forces[1][1], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rf_rot_3, rotation_forces[1][2], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lb_rot_1, rotation_forces[2][0], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lb_rot_2, rotation_forces[2][1], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lb_rot_3, rotation_forces[2][2], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lf_rot_1, rotation_forces[3][0], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lf_rot_2, rotation_forces[3][1], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lf_rot_3, rotation_forces[3][2], sim.simx_opmode_blocking)return [rb_rot_1, rb_rot_2, rb_rot_3], \[rf_rot_1, rf_rot_2, rf_rot_3], \[lb_rot_1, lb_rot_2, lb_rot_3], \[lf_rot_1, lf_rot_2, lf_rot_3]def leg_inverse_kine(x, y, z):# h,hu和hl分别是单条腿杆件的长度h = 0.15hu = 0.35hl = 0.382dyz = np.sqrt(y**2 + z**2)lyz = np.sqrt(dyz**2 - h**2)gamma_yz = -np.arctan(y/z)gamma_h_offset = -np.arctan(h/lyz)gamma = gamma_yz - gamma_h_offsetlxzp = np.sqrt(lyz**2 + x**2)n = (lxzp**2 - hl**2 - hu**2) / (2 * hu)beta = -np.arccos(n / hl)alfa_xzp = -np.arctan(x/lyz)alfa_off = np.arccos((hu + n) / lxzp)alfa = alfa_xzp + alfa_offreturn gamma, alfa, betaif __name__ == '__main__':# 机器人电机角度参数rb_poses = [40*np.pi/180, 0, 0]rf_poses = [0, 0, 0]lb_poses = [0, 0, 0]lf_poses = [0, 0, 0]client_id = start_simulation()if client_id != -1:joints = get_joints(client_id)rb_joints = joints[0]rf_joints = joints[1]lb_joints = joints[2]lf_joints = joints[3]time.sleep(1)timeout = 60start_time = time.time()curr_time = time.time()# 初始关节角度rb_poses = leg_inverse_kine(0, -0.3, -0.632)rf_poses = leg_inverse_kine(0, -0.3, -0.632)lb_poses = leg_inverse_kine(0, -0.3, -0.632)lf_poses = leg_inverse_kine(0, -0.3, -0.632)while curr_time - start_time < timeout:# 设置关节角度rec = sim.simxSetJointTargetPosition(client_id, rb_joints[0], -rb_poses[0], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, rb_joints[1], rb_poses[1], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, rb_joints[2], rb_poses[2], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, rf_joints[0], rf_poses[0], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, rf_joints[1], rf_poses[1], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, rf_joints[2], rf_poses[2], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, lb_joints[0], -lb_poses[0], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, lb_joints[1], lb_poses[1], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, lb_joints[2], lb_poses[2], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, lf_joints[0], lf_poses[0], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, lf_joints[1], lf_poses[1], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(client_id, lf_joints[2], lf_poses[2], sim.simx_opmode_oneshot)curr_time = time.time()# print("curr time :", curr_time - start_time)# 完成模拟sim.simxStopSimulation(client_id, sim.simx_opmode_blocking)sim.simxFinish(client_id)else:print('Failed connecting to remote API server')显示足端轨迹
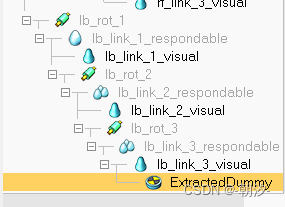
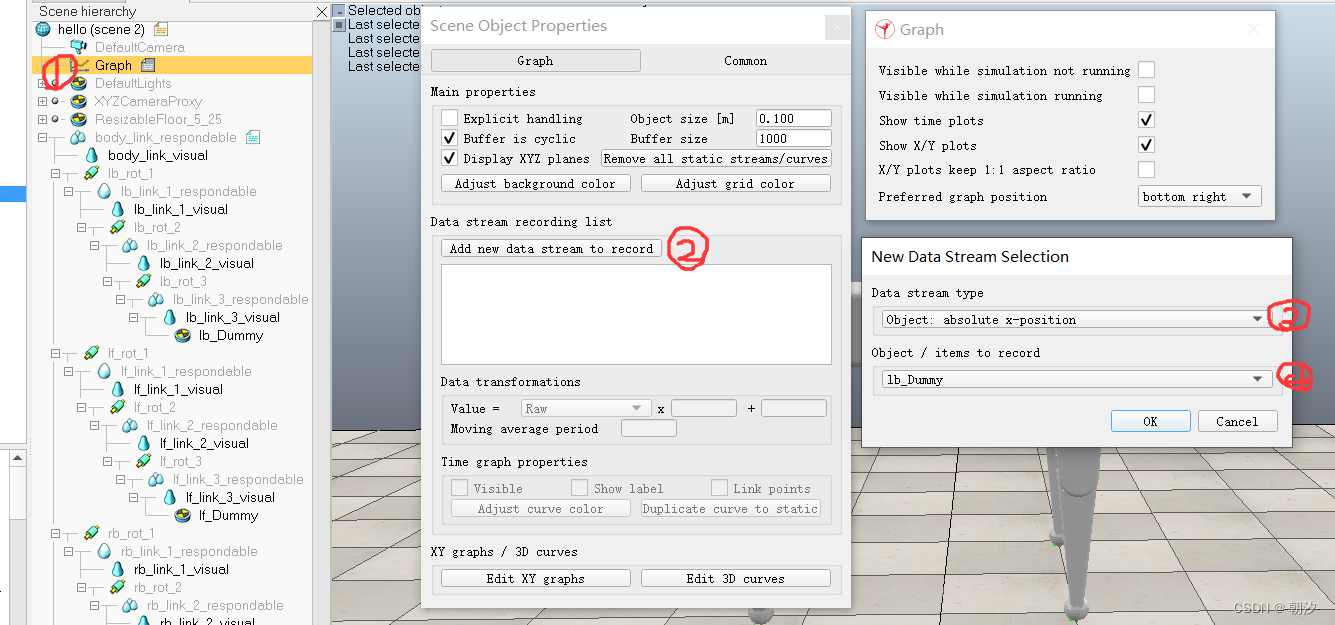
1. 打开shape编辑模式,并在vertex编辑模式下选择节点,在添加dummy

将dummy移动到腿部object下
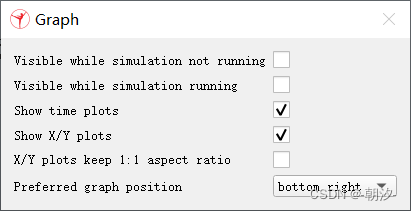
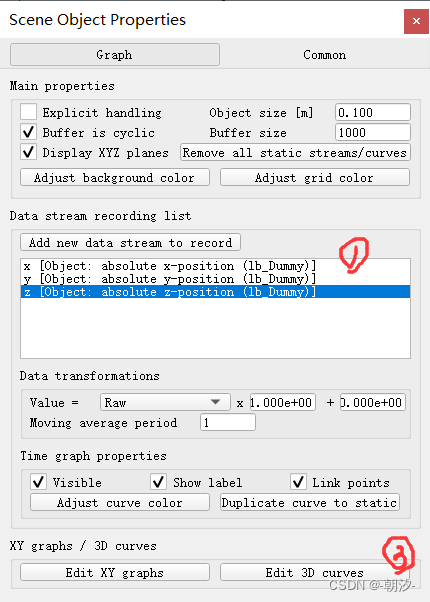
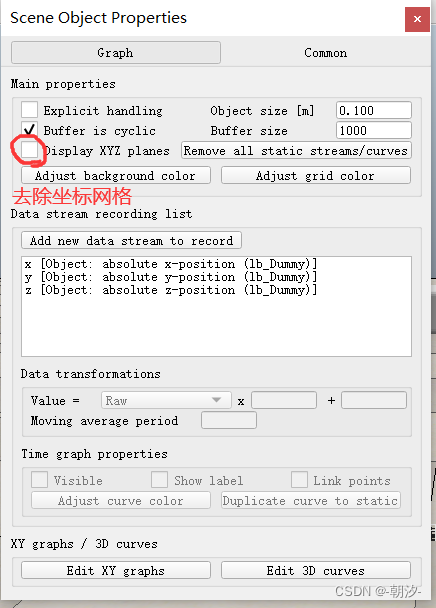
2. 添加图用于创建curve

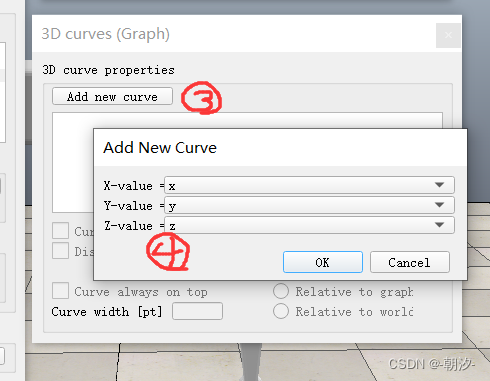
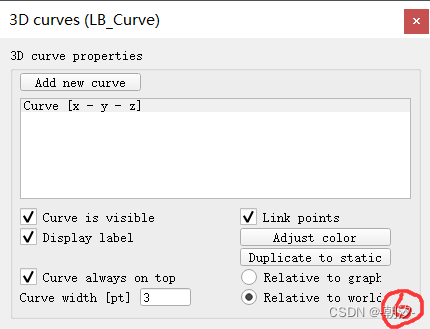
3. 设置3D Curve

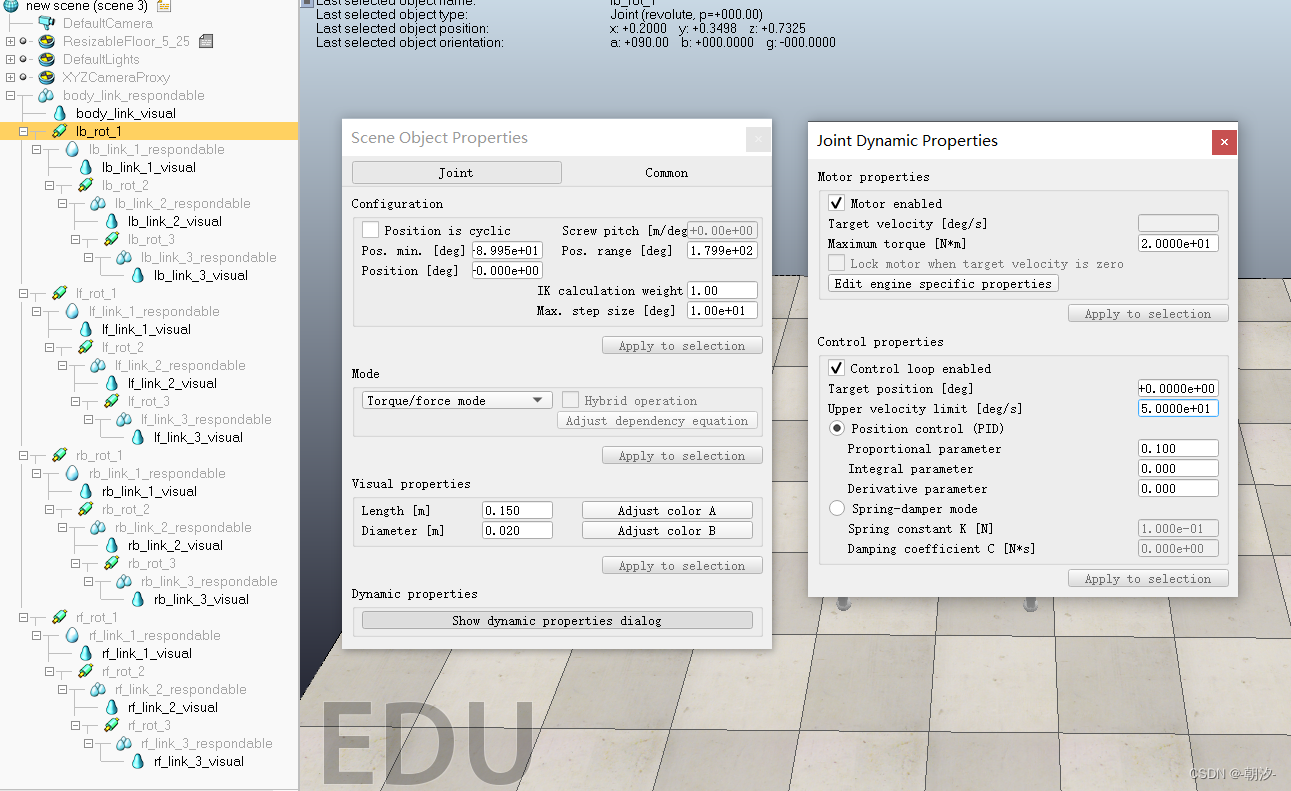
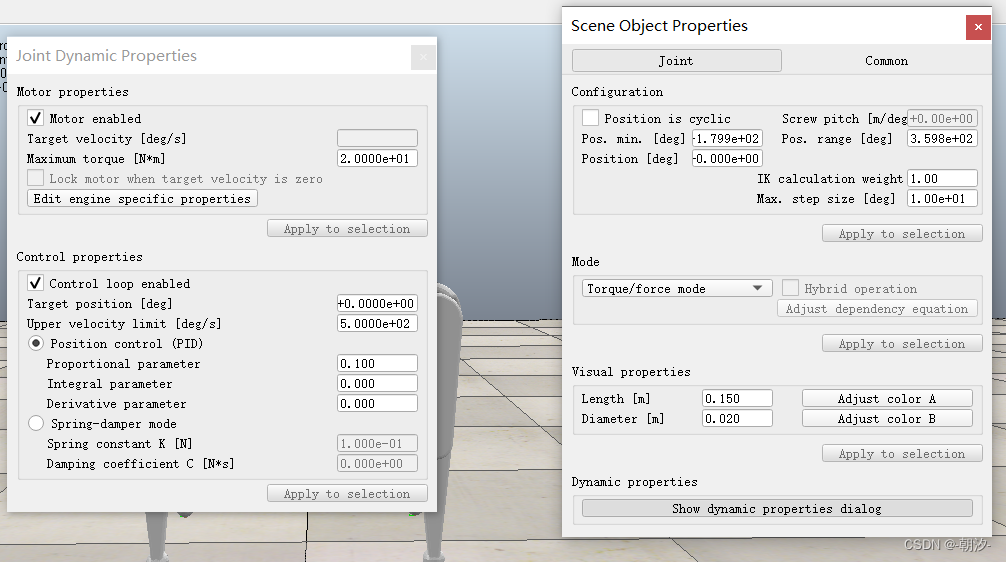
4. 修改位置控制速度上限(将速度上限修改为500)
步态控制
utils.py
import sim
import numpy as npdef start_simulation():sim.simxFinish(-1)# 开启套接字与server进行通信clientID = sim.simxStart('127.0.0.1', 19999, True, True, 5000, 5)if clientID != -1:print('Connected to remote API server with ClientID ', clientID)# 开始模拟sim.simxStartSimulation(clientID, sim.simx_opmode_oneshot)return clientIDelse:return -1def get_joints(client_id):# 机器人电机力矩参数rotation_forces = [# RB[500, 500, 500],# RF[500, 500, 500],# LB[500, 500, 500],# LF[500, 500, 500]]# 获取机器人关节对象句柄rec, rb_rot_1 = sim.simxGetObjectHandle(client_id, 'rb_rot_1', sim.simx_opmode_blocking)rec, rb_rot_2 = sim.simxGetObjectHandle(client_id, 'rb_rot_2', sim.simx_opmode_blocking)rec, rb_rot_3 = sim.simxGetObjectHandle(client_id, 'rb_rot_3', sim.simx_opmode_blocking)rec, rf_rot_1 = sim.simxGetObjectHandle(client_id, 'rf_rot_1', sim.simx_opmode_blocking)rec, rf_rot_2 = sim.simxGetObjectHandle(client_id, 'rf_rot_2', sim.simx_opmode_blocking)rec, rf_rot_3 = sim.simxGetObjectHandle(client_id, 'rf_rot_3', sim.simx_opmode_blocking)rec, lb_rot_1 = sim.simxGetObjectHandle(client_id, 'lb_rot_1', sim.simx_opmode_blocking)rec, lb_rot_2 = sim.simxGetObjectHandle(client_id, 'lb_rot_2', sim.simx_opmode_blocking)rec, lb_rot_3 = sim.simxGetObjectHandle(client_id, 'lb_rot_3', sim.simx_opmode_blocking)rec, lf_rot_1 = sim.simxGetObjectHandle(client_id, 'lf_rot_1', sim.simx_opmode_blocking)rec, lf_rot_2 = sim.simxGetObjectHandle(client_id, 'lf_rot_2', sim.simx_opmode_blocking)rec, lf_rot_3 = sim.simxGetObjectHandle(client_id, 'lf_rot_3', sim.simx_opmode_blocking)# 设置电机力矩rec = sim.simxSetJointForce(client_id, rb_rot_1, rotation_forces[0][0], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rb_rot_2, rotation_forces[0][1], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rb_rot_3, rotation_forces[0][2], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rf_rot_1, rotation_forces[1][0], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rf_rot_2, rotation_forces[1][1], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, rf_rot_3, rotation_forces[1][2], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lb_rot_1, rotation_forces[2][0], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lb_rot_2, rotation_forces[2][1], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lb_rot_3, rotation_forces[2][2], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lf_rot_1, rotation_forces[3][0], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lf_rot_2, rotation_forces[3][1], sim.simx_opmode_blocking)rec = sim.simxSetJointForce(client_id, lf_rot_3, rotation_forces[3][2], sim.simx_opmode_blocking)return [rb_rot_1, rb_rot_2, rb_rot_3], \[rf_rot_1, rf_rot_2, rf_rot_3], \[lb_rot_1, lb_rot_2, lb_rot_3], \[lf_rot_1, lf_rot_2, lf_rot_3]def leg_inverse_kine(x, y, z):"""求四足机器人单条腿的逆运动学,输入足端位置,返回单腿关节的旋转的角度"""# h,hu和hl分别是单条腿杆件的长度h = 0.15hu = 0.35hl = 0.382dyz = np.sqrt(y ** 2 + z ** 2)lyz = np.sqrt(dyz ** 2 - h ** 2)gamma_yz = -np.arctan(y / z)gamma_h_offset = -np.arctan(h / lyz)gamma = gamma_yz - gamma_h_offsetlxzp = np.sqrt(lyz ** 2 + x ** 2)n = (lxzp ** 2 - hl ** 2 - hu ** 2) / (2 * hu)beta = -np.arccos(n / hl)alfa_xzp = -np.arctan(x / lyz)alfa_off = np.arccos((hu + n) / lxzp)alfa = alfa_xzp + alfa_offreturn gamma, alfa, betadef pose_control(roll, pitch, yaw, pos_x, pos_y, pos_z):"""输入"""b = 0.4l = 0.8w = 0.7# 基座的高度h = 0.732# 转换角度R = roll * np.pi / 180P = pitch * np.pi / 180Y = yaw * np.pi / 180pos = np.mat([pos_x, pos_y, pos_z]).T# 定义旋转矩阵rotx = np.mat([[1, 0, 0],[0, np.cos(R), -np.sin(R)],[0, np.sin(R), np.cos(R)]])roty = np.mat([[np.cos(P), 0, -np.sin(P)],[0, 1, 0],[np.sin(P), 0, np.cos(P)]])rotz = np.mat([[np.cos(Y), -np.sin(Y), 0],[np.sin(Y), np.cos(Y), 0],[0, 0, 1]])rot_mat = rotx * roty * rotz# 基座位置body_struct = np.mat([[l / 2, b / 2, h],[l / 2, -b / 2, h],[-l / 2, b / 2, h],[-l / 2, -b / 2, h]]).T# 足端位置footpoint_struct = np.mat([[l / 2, w / 2, 0],[l / 2, -w / 2, 0],[-l / 2, w / 2, 0],[-l / 2, -w / 2, 0]]).Tleg_pose = np.mat(np.zeros((3, 4)))for i in range(4):leg_pose[:, i] = -pos - rot_mat * body_struct[:, i] + footpoint_struct[:, i]return np.squeeze(np.array(leg_pose[:, 3])), np.squeeze(np.array(leg_pose[:, 0])), \np.squeeze(np.array(leg_pose[:, 1])), np.squeeze(np.array(leg_pose[:, 2]))def cycloid(dt: float, period: float = 1.0, xs: float = -0.1, xf: float = 0.1, zs: float = -0.582, h: float = 0.1):"""计算摆线上在给定时间t处的坐标。参数:t (float): 当前时间点Ts (float): 摆线运动总时间,默认为1.0xs (float): 起始x坐标,默认为-0.1xf (float): 终点x坐标,默认为0.1zs (float): 起始z坐标,默认为-0.582h (float): 摆线垂直位移,默认为0.1返回:tuple[float, float]: xep和zep的坐标值"""sigma = 2 * np.pi * dt / periodx_p = (xf - xs) * ((sigma - np.sin(sigma)) / (2 * np.pi)) + xsy_p = h * (1 - np.cos(sigma)) / 2 + zsreturn x_p, y_pif __name__ == '__main__':for pos in pose_control(30, 0, 0, 0, 0, 0.732):print(pos)
main.py
import time
from utils import *walk_period = 1.0
trot_period = 0.4gait = 1def cal_phase(dt, T, factor, zs = -0.482, h = 0.15):if dt < T * factor:return cycloid(dt, period=T * factor, zs=zs, h=h)else:return 0.1 - 0.2 / (T * (1 - factor)) * (dt - T * factor), zsdef walk_gait(dt):zs = -0.482h = 0.15lb_dt = dt % walk_periodrf_dt = (dt + 0.25) % walk_periodrb_dt = (dt + 0.5) % walk_periodlf_dt = (dt + 0.75) % walk_periodlb_pos = cal_phase(lb_dt, T=walk_period, factor=0.25, zs=zs, h=h)rf_pos = cal_phase(rf_dt, T=walk_period, factor=0.25, zs=zs, h=h)rb_pos = cal_phase(rb_dt, T=walk_period, factor=0.25, zs=zs, h=h)lf_pos = cal_phase(lf_dt, T=walk_period, factor=0.25, zs=zs, h=h)return lb_pos, rf_pos, rb_pos, lf_posdef trot_gait(dt):zs = -0.482h = 0.1dt_1 = dt % trot_perioddt_2 = (dt + 0.2) % trot_periodpos_1 = cal_phase(dt_1, T=trot_period, factor=0.5, zs=zs, h=h)pos_2 = cal_phase(dt_2, T=trot_period, factor=0.5, zs=zs, h=h)return pos_1, pos_2if __name__ == '__main__':# 连接到V-REP服务器clientID = start_simulation()# 检查连接是否成功if clientID != -1:joints = get_joints(clientID)rb_joints = joints[0]rf_joints = joints[1]lb_joints = joints[2]lf_joints = joints[3]timeout = 60start_time = time.time()curr_time = start_timesim_start_time, sim_curr_time = None, Nonelb_pos, rf_pos, rb_pos, lf_pos = None, None, None, None# 获取仿真时间while curr_time - start_time < timeout:res, sim_curr_time = sim.simxGetFloatSignal(clientID, 'time', sim.simx_opmode_oneshot)if res == sim.simx_return_ok:if sim_start_time is None:sim_start_time = sim_curr_timeprint("time ", sim_curr_time - sim_start_time)if sim_start_time:dt = sim_curr_time - sim_start_timeif gait == 0:# dt = (sim_curr_time - sim_start_time) % walk_periodlb_pos, rf_pos, rb_pos, lf_pos = walk_gait(dt)elif gait == 1:# dt = (sim_curr_time - sim_start_time) % trot_periodpos_1, pos_2 = trot_gait(dt)lb_pos = pos_1rf_pos = pos_1rb_pos = pos_2lf_pos = pos_2# 从足端位置求解关节角度rb_pose = leg_inverse_kine(rb_pos[0], -0.15, rb_pos[1])rf_pose = leg_inverse_kine(rf_pos[0], -0.15, rf_pos[1])lb_pose = leg_inverse_kine(lb_pos[0], -0.15, lb_pos[1])lf_pose = leg_inverse_kine(lf_pos[0], -0.15, lf_pos[1])rec = sim.simxSetJointTargetPosition(clientID, rb_joints[0], -rb_pose[0], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, rb_joints[1], rb_pose[1], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, rb_joints[2], rb_pose[2], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, rf_joints[0], rf_pose[0], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, rf_joints[1], rf_pose[1], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, rf_joints[2], rf_pose[2], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, lb_joints[0], -lb_pose[0], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, lb_joints[1], lb_pose[1], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, lb_joints[2], lb_pose[2], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, lf_joints[0], lf_pose[0], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, lf_joints[1], lf_pose[1], sim.simx_opmode_oneshot)rec = sim.simxSetJointTargetPosition(clientID, lf_joints[2], lf_pose[2], sim.simx_opmode_oneshot)# 停止仿真并断开与V-REP的连接sim.simxStopSimulation(clientID, sim.simx_opmode_oneshot)sim.simxFinish(clientID)else:print("无法连接到V-REP")
walk步态
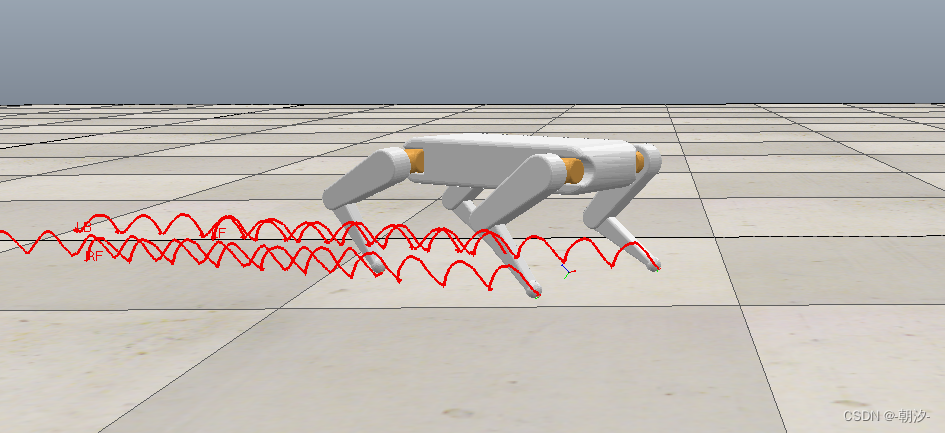
trot步态