100个免费推广网站游戏推广员骗局
使用xbox手柄控制小乌龟,首先要下载joy功能包,发布sensor_msgs话题也就是手柄和ros通信的话题。
下载的步骤就根据官方文档即可
joy/Tutorials/ConfiguringALinuxJoystick - ROS Wiki
这里我提供一下具体步骤
第一步 安装joy
首先安装对应系统版本的joy
sudo apt-get install ros-noetic-joy连接号手柄查看手柄的接口
ls /dev/input/查看情况如下

其中的jsX,这里是js0就是手柄的接口,接着使用如下命令查看手柄是否有数据,jsX改为对应的js0。
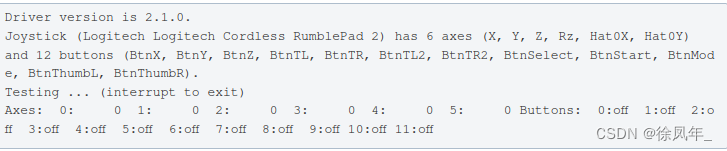
sudo jstest /dev/input/js0你将看到如下情况,移动手柄按钮摇杆看到数据变化,即初步成功
现在我在将他连接到ros节点上,列出手柄权限
ls -l /dev/input/jsX输出如下
![]()
如果XX为rw,则配置正确
如果XX为--,则没有配置正确你需要,给他权限
(在这里我自己是复杂的所以我选择直接执行的chmod)
sudo chmod a+rw /dev/input/jsX如上操作后就已经成功了,让我们启动joy节点验证一下,首先,让我们告诉joy节点要使用的操纵杆设备默认为js0
roscore
rosparam set joy_node/dev "/dev/input/js0"现在就可以启动joy了
rosrun joy joy_node如果一切正常,你将会看到

如果你和我一样执行的chmod,有可能会看到

不用担心也是可以正常使用的!
启动节点后打印查看具体话题发布的信息
rostopic echo joy移动按键观察有输出即证明安装好了。
第二步 使用手柄控制小乌龟
以下控制程序皆来源于合工大机器人实验室博主,我只是作为一个记录,和一点程序完善
原文链接:https://blog.csdn.net/qq_34935373/article/details/87905784
要想使用手柄控制小乌龟节点运动,我们要知道
想让手柄/joy_node节点控制/turtlesim_node节点,必须创建一个节点,一边接受/joy_node节点发布的/sensor_msgs/Joy的话题消息,一边再通过话题/turtle1/cmd_vel发布消息给/turtlesim_node。这个节点就得完场消息数据的转换。
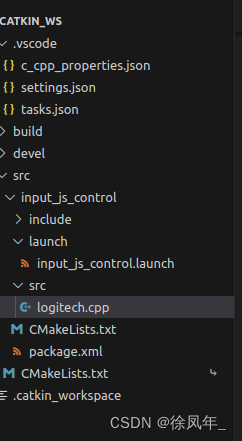
建立一个工作空间,建一个功能包input_js_control ,设置依赖为roscpp rospy std_msgs,如上,在功能包input_js_control 的src下建立用于实现订阅joy和发布给cmd_vel的cpp文件logitech.cpp,实现代码如下:
#include<ros/ros.h>#include<geometry_msgs/Twist.h>#include <sensor_msgs/Joy.h>#include<iostream>using namespace std;class Teleop{public:Teleop();private:/* data */void callback(const sensor_msgs::Joy::ConstPtr& Joy);ros::NodeHandle n; //实例化节点ros::Subscriber sub ;ros::Publisher pub ;double vlinear,vangular;//我们控制乌龟的速度,是通过这两个变量调整int axis_ang,axis_lin; //axes[]的键};Teleop::Teleop(){//我们将这几个变量加上参数,可以在参数服务器方便修改n.param<int>("axis_linear",axis_lin,1); //默认axes[1]接收速度n.param<int>("axis_angular",axis_ang,0);//默认axes[0]接收角度n.param<double>("vel_linear",vlinear,1);//默认线速度1 m/sn.param<double>("vel_angular",vangular,1);//默认角速度1 单位rad/spub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",1);//将速度发给乌龟sub = n.subscribe<sensor_msgs::Joy>("joy",10,&Teleop::callback,this);//订阅游戏手柄发来的数据} void Teleop::callback(const sensor_msgs::Joy::ConstPtr& Joy){geometry_msgs::Twist v;v.linear.x =Joy->axes[axis_lin]*vlinear; //将游戏手柄的数据乘以你想要的速度,然后发给乌龟v.angular.z =Joy->axes[axis_ang]*vangular;ROS_INFO("linear:%.3lf angular:%.3lf",v.linear.x,v.angular.z);pub.publish(v);}int main(int argc,char** argv){ros::init(argc, argv, "joy_to_turtle");Teleop teleop_turtle;ros::spin();return 0;}在创建launch文件夹创一个launch文件input_js_control.launch集合启动所有节点:
以下是我对这个launch文件的理解和改善过的代码:
<launch><!-- roslaunch已经启动roscore --><!-- 相当于rosrun turtlesim turtlesim_node --><node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node"></node><!-- 相当于rosrun input_js_control logitech --><node pkg="input_js_control" type="logitech" name="joy_to_turtle" output="screen"> </node><!--input axis 4,3代表右摇杆 1,0代表左摇杆 2代表左扳机 --><param name="axis_linear" value="1" type="int"/><param name="axis_angular" value="0" type="int"/><!--input vel 2,1.5 --><param name="vel_linear" value="1" type="double"/><param name="vel_angular" value="1" type="double"/><!-- 相当于rosrun joy joy_node --><node respawn="true" pkg="joy" type="joy_node" name="joystick" > </node></launch>
另外编译之前要配置package.xml文件和CMakeLists.txt文件
对package.xml文件:
<buildtool_depend>catkin</buildtool_depend><build_depend>roscpp</build_depend><build_depend>rospy</build_depend><build_depend>std_msgs</build_depend><build_depend>geometry_msgs</build_depend><build_depend>sensor_msgs</build_depend><build_export_depend>roscpp</build_export_depend><build_export_depend>rospy</build_export_depend><build_export_depend>geometry_msgs</build_export_depend><build_export_depend>std_msgs</build_export_depend><build_export_depend>sensor_msgs</build_export_depend><exec_depend>roscpp</exec_depend><exec_depend>rospy</exec_depend><exec_depend>std_msgs</exec_depend><exec_depend>message_runtime</exec_depend>对CMakeLists.txt文件:
cmake_minimum_required(VERSION 3.0.2)
project(input_js_control)find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsgeometry_msgssensor_msgs
)catkin_package(CATKIN_DEPENDS roscpp rospy std_msgs geometry_msgs sensor_msgs
)include_directories(${catkin_INCLUDE_DIRS}
)add_executable(logitech src/logitech.cpp)add_dependencies(logitech ${${PROJECT_NAME}_EXPORTED_TARGETS}${catkin_EXPORTED_TARGETS})target_link_libraries(logitech${catkin_LIBRARIES}
)
配置完成后编译,catkin_make之后运行launch文件即可使用左摇杆控制小乌龟移动!